Ofertas en: Ingeniería en Sistemas de Telecomunicación
Supervisor académico:
Héctor Solar
Departamento Tecnun/Grupo CEIT:
Tecnun: Departamento de Ingeniería Eléctrica y Electrónica
Área temática:
Diseño electrónico
Descripción y objetivos: El objetivo de este proyecto es el diseño de un mixer y la integración del mismo con un amplificador de bajo ruido (LNA), para desarrollar el front-end analógico (recuadro en rojo) de un sistema de lectura de qubits semiconductores. Específicamente, se desarrollará la electrónica para qubits de espín de electrones. La herramienta de diseño es CADENCE, y la tecnología a utilizar es IHP SiGe BiCMOS 0.35um, pues tiene modelos para temperaturas de 4K. El estudiante deberá de realizar el diseño esquemático, optimizar su rendimiento, diseñar el layout e integrarlo con el LNA.

Supervisor académico:
Héctor Solar
Departamento Tecnun/Grupo CEIT:
Tecnun: Departamento de Ingeniería Eléctrica y Electrónica
Área temática:
Sistemas de comunicaciones
Descripción y objetivos: El objetivo de este proyecto es integrar un conjunto de herramientas software y hardware para poner en marcha un centro de producción audiovisual basado en un mezclador semi profesional ATEM.
El estudiante tendrá que aprender a utilizar e integrar diferentes equipos audiovisuales: cámaras, micrófonos, convertidores, mezcladores, cableado, ordenadores etc.; con aplicaciones software para el control remoto y operación del centro.

Supervisor académico:
Santiago Miguel Olaizola / Iñigo Ramón Conde / Aitor Larrañaga Jaio
Departamento Tecnun/Grupo CEIT:
CEIT: División Materiales y Fabricación: grupo de Fabricación Láser de Precisión
Área temática:
Inteligencia Artificial, Machine Learning, Sensorización de Procesos, Tratamiento de Datos, Automatización Industrial, Metrología óptica, Perfilometría, Procesado Láser Avanzado, Caracterización de Materiales
Descripción y objetivos:
Este Proyecto Fin de Grado (PFG) aborda la creciente necesidad en la Industria 4.0 de controlar y optimizar procesos de fabricación avanzados. Se centra en el láser de femtosegundo como herramienta versátil para el procesado de materiales (incluyendo micromecanizado por ablación, texturizado superficial y/o funcional, y termalización controlada de superficies).
El proyecto busca crear un Sistema Láser Inteligente Híbrido que integre un modelo predictivo (IA) con datos de monitorización en tiempo real (sensorización) para lograr un control de calidad en línea y la optimización dinámica del proceso, independientemente de la aplicación específica de procesado. El enfoque permite que la metodología desarrollada sea adaptable a múltiples aplicaciones de láser de pulso ultracorto.
Los objetivos de este PFG son los siguientes:
-
Modelado de Procesos y Desarrollo de Gemelo Digital (IA): Desarrollar y evaluar modelos de Machine Learning (ML) y Deep Learning (por ejemplo, redes neuronales recurrentes o convolucionales) capaces de actuar como un gemelo digital del proceso. El modelo deberá predecir una variedad de métricas de resultado (e.g., profundidad de ablación, rugosidad, cambios en la composición o reflectividad) a partir de los parámetros de entrada del láser (potencia, scan speed, frecuencia, etc.)
-
Integración de Datos de Sensorización: Conceptualizar y diseñar la integración de features de entrada provenientes de sistemas de monitorización del proceso (e.g., cámaras de alta velocidad, pirómetros, espectroscopía de emisión de plasma, o metrología óptica in-situ). Esto busca enriquecer la base de datos y permitir que el modelo de IA caracterice el estado del proceso en curso, no solo los resultados finales.
La participación en este PFG permitirá al estudiante adquirir un conjunto de habilidades multidisciplinares y de alta demanda en la Industria 4.0, tales como aplicación de Inteligencia Artificial y Machine Learning a problemas de fabricación avanzada; o integración y tratamiento de grandes volúmenes de datos de sensorización industrial y metrología. Adicionalmente, también permitirá desarrollar habilidades transversales clave en el diseño de experimentos, la resolución de problemas complejos y el análisis crítico.
Supervisor académico:
Ainara Rodriguez / Iñigo Ramón Conde / Aitor Larrañaga Jaio
Departamento Tecnun/Grupo CEIT:
CEIT: División Materiales y Fabricación: grupo de Fabricación Láser de Precisión
Área temática:
Tratamiento de Datos, Automatización Industrial, Metrología óptica, Perfilometría Caracterización de Materiales, Inteligencia Artificial, Machine Learning, Micromecanizado Láser
Descripción y objetivos:
Este Proyecto Fin de Grado se centra en la aplicación de técnicas avanzadas de Inteligencia Artificial (IA) y Machine Learning (ML) para abordar la optimización multiobjetivo de un proceso de fabricación de gran relevancia: la ablación fría mediante láser de pulso ultracorto.
El proyecto parte de una base de datos preexistente y caracterizada, que contiene los parámetros de control del láser (potencia, scan speed, distancia entre pasadas, tren de pulsos, etc.) como features de entrada, y las métricas de calidad (profundidad y rugosidad) como targets de salida. Cabe destacar que la base de datos es ampliable, pudiéndose incorporar nuevas features o métricas de calidad adicionales para enriquecer el modelo y aumentar su capacidad predictiva.
El proyecto persigue un doble objetivo:
-
Predicción del proceso: desarrollar y evaluar modelos de regresión neuronal y otros enfoques avanzados de ML con el fin de construir un gemelo digital del proceso. Dicho modelo permitirá predecir con alta precisión la profundidad y la rugosidad resultantes a partir de cualquier combinación de parámetros de entrada.
-
Optimización de resultados: emplear el modelo predictivo como función de coste en algoritmos de optimización —como Algoritmos Genéticos o Bayesian Optimization— para identificar, de forma autónoma, las combinaciones de parámetros más adecuadas. El propósito es satisfacer simultáneamente criterios competitivos de ingeniería, como maximizar la Tasa de Extracción de Material y minimizar la Rugosidad Superficial.
Adicionalmente, se plantea un tercer objetivo de aplicación de técnicas avanzadas de entrenamiento para explorar y evaluar estrategias avanzadas para mejorar la precisión y robustez del modelo, tales como generación de datos sintéticos, sliding-window cropping, técnicas de regularización, transfer learning y ensembling; con el objetivo de optimizar la capacidad del modelo, incluso cuando los datos experimentales son limitados o presentan variabilidad.
Durante su desarrollo, este PFG permitirá adquirir competencias técnicas muy demandadas, como el uso de IA y ML en problemas reales, la optimización multiobjetivo, la creación de gemelos digitales o el manejo avanzado de bases de datos y librerías de programación en Python. Asimismo, potenciará habilidades transversales clave como el análisis crítico, la resolución de problemas complejos y la comunicación técnica.
En conjunto, el trabajo busca dar lugar a un sistema inteligente que no solo prediga, sino que también ofrezca una herramienta de apoyo a la toma de decisiones en entornos de automatización industrial orientados a la Industria 4.0.
Supervisor académico:
Isabel Ayerdi - Aitor Larrañaga Jaio
Departamento Tecnun/Grupo CEIT:
CEIT: División Materiales y Fabricación: grupo de Fabricación Láser de Precisión
Área temática:
Automatización Industrial, Metrología óptica, Perfilometría, Caracterización de Materiales, Control de calidad, Ciencia de datos, Inteligencia Artificial
Descripción y objetivos:
La optimización y control de procesos láser mediante modelos de IA requiere vastos conjuntos de datos que vinculen los parámetros de entrada (potencia, velocidad de escaneo, frecuencia, pitch, etc.) con las métricas de calidad de salida. El estudiante colaborará en la creación de una base de datos de micromecanizado de alta precisión a partir de muestras grabadas con diversas condiciones láser.
La labor principal del estudiante será el desarrollo y la estandarización de una herramienta metodológica de automatización que interactúe con el perfilómetro 3D Sensofar S Neox para caracterizar de forma masiva y repetible las muestras de micromecanizado láser. El estudiante deberá configurar e implementar las rutinas en el software Sensofar que permitan automatizar la adquisición de datos de perfilometría 3D y el procesamiento posterior para la extracción de métricas clave (profundidad, rugosidad, ángulos, etc.).
Este proceso eliminará la necesidad de mediciones manuales, creando un flujo de datos limpio, estructurado y robusto, que alimentará una base de datos para la creación de una IA. Si la automatización se consigue rápidamente, el proyecto incluirá una fase de implementación de IA básica sobre los datos generados en Python.
Objetivos:
-
Estandarizar y documentar el protocolo de adquisición utilizando las Recetas MMR (Multiple Measurement Routine) de SensoSCAN para la automatización del stage XY y la secuencia de medición.
-
Desarrollar e implementar las Recetas de Análisis en SensoPRO para el cálculo automático y la extracción de las métricas de calidad (rugosidad, profundidad, ángulos de pared) a partir de los datos obtenidos.
-
Crear el workflow de datos que combine los parámetros de proceso (entrada) con las métricas de calidad (salida) en un dataset estructurado y listo para el Machine Learning.
Si el tiempo lo permite, implementar un algoritmo sencillo de Machine Learning para realizar la primera predicción de calidad sobre el dataset generado
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/Grupo CEIT:
División TIC
Área temática:
Optimización Matemática, Data Science
Descripción y Objetivos:
Desarrollo de una aplicación en Python para automatizar el análisis exploratorio de datos (EDA) y el modelado predictivo de regresión.
El objetivo es construir una herramienta capaz de leer una base de datos (CSV/SQL), clasificar variables automáticamente (numéricas, categóricas), realizar estudios estadísticos univariantes y bivariantes (correlaciones, gráficos) y, finalmente, aplicar y comparar automáticamente modelos de regresión para una variable de interés. La meta es ofrecer un software robusto para el inicio rápido de proyectos de Data Science.
Actividades Propuestas:
-
Revisión de técnicas de AutoEDA y AutoRegresión.
-
Módulo de Ingesta: Lectura de datos y clasificación automática de variables.
-
Módulo EDA: Implementación de estudios estadísticos y gráficos automáticos (univariantes y de relación entre variables).
-
Módulo de Regresión: Preprocesamiento automático y ajuste/comparación de múltiples algoritmos de regresión (AutoML simplificado).
Interfaz de Usuario: Desarrollo de una interfaz (e.g., Shiny) para la visualización de resultados e insights.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/Grupo CEIT:
CEIT – División TIC
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
El problema de cuadrar horarios de mantenimiento, conocido como Problema de Programación de Mantenimiento o Problema de Planificación de Mantenimiento (Maintenance Scheduling Problem), consiste en organizar actividades de mantenimiento dentro de un calendario de manera óptima. Este problema busca minimizar interrupciones y costos operativos, asegurando que tanto el mantenimiento preventivo como el correctivo se realicen en los momentos adecuados.
El objetivo de este proyecto de fin de grado es desarrollar una herramienta de optimización que aborde la programación eficiente de horarios de mantenimiento. La herramienta se desarrollará preferentemente en Python, con opciones adicionales de Matlab o R.
Actividades propuestas para el estudiante:
1. Revisión bibliográfica sobre los problemas y algoritmos de optimización más comunes aplicados en programación de mantenimiento.
2. Formulación matemática del problema, estableciendo los criterios y restricciones relevantes.
3. Implementación de la solución utilizando un algoritmo heurístico de optimización o solvers de código abierto.
4. Análisis de resultados y comparación de la efectividad del enfoque aplicado, con recomendaciones para su uso en distintas situaciones de mantenimiento.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/Grupo CEIT:
CEIT – División TIC
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
La aplicación de covariables dependientes del tiempo en análisis de supervivencia ha mejorado la predicción del tiempo de impago en modelos de scoring crediticio de comportamiento. Sin embargo, cuando estas covariables son endógenas, se producen dos problemas: sesgo en la estimación y la falta de un marco para predecir los valores futuros del evento y las covariables.
Los modelos conjuntos (joint models) son un enfoque estadístico que integra simultáneamente datos longitudinales y de supervivencia, permitiendo modelar la evolución conjunta de un evento de interés (como el tiempo de impago) y de las covariables endógenas dependientes del tiempo. Este proyecto explora por primera vez la aplicación de modelos conjuntos en tiempo discreto al scoring crediticio, y propone una extensión novedosa mediante la inclusión de términos autorregresivos en las covariables endógenas.
El proyecto aplicará estos métodos a datos de hipotecas en EE. UU., evaluando si los modelos conjuntos en tiempo discreto mejoran la precisión predictiva en comparación con los modelos de supervivencia tradicionales y si el rendimiento se optimiza al incluir un término autorregresivo.
Actividades propuestas para el estudiante:
1. Revisión bibliográfica sobre modelos conjuntos y su aplicación en scoring crediticio.
2. Formulación matemática del modelo conjunto en tiempo discreto.
3. Implementación del modelo en R o Python.
4. Análisis de resultados, comparando el rendimiento predictivo frente a otros modelos.
Este proyecto permitirá al estudiante explorar técnicas avanzadas de modelado estadístico aplicadas a datos financieros y mejorar las predicciones en el contexto del riesgo crediticio.
Supervisor académico:
Dr. Carlos Alejandro Peñuelas Angulo
Departamento Tecnun/Grupo CEIT:
CEIT – División TIC
Área temática:
Seguridad de la información, Análisis de datos
Descripción y objetivos:
El propósito general de este proyecto es el diseño e implementación de una arquitectura que ofrezca funciones análisis de datos (Machine Learning, data mining, etc.) como servicio implementando mecanismos para la preservación de la privacidad de los datos, también conocidos como Privacy Enhancing Technologies (PETs). Esto puede incluir desde el uso de mecanismos criptográficos avanzados hasta el aprendizaje federado.
Las actividades esperadas a realizar durante la ejecución de este proyecto son:
-
Analizar ejemplos de PETs aplicadas al análisis de datos.
-
Diseñar una arquitectura para el análisis de datos como servicio con preservación de privacidad.
-
Implementar la arquitectura utilizando tecnologías de vanguardia.
Supervisor académico:
Saioa Arrizabalaga
Departamento Tecnun/Grupo CEIT:
CEIT - División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Desarrollo de software, Privacidad, Automatización de código, contenedores
Descripción y objetivos:
-
Fides es una plataforma de código abierto de gestión de la privacidad, que permite aplicar normas de privacidad a nivel de código. Las herramientas de Fides permite etiquetar las características de privacidad del sistema, orquestar el cumplimiento de los derechos programáticos y auditar la información personal identificable almacenada en todos los sistemas e infraestructuras de las aplicaciones. Fides a su vez, es compatible con las principales normativas de privacidad (por ejemplo, GDPR, CCPA y LGPD), y con normas como la ISO 19944 por defecto.
-
Este proyecto busca la implementación automatizada de la plataforma Fides en un caso de uso práctico, de manera que pueda crearse una definición coherente y versionada de las características y los recursos de privacidad de este sistema, siendo utilizado como parte de un pipeline de CI/CD para procesar las solicitudes de privacidad.
Supervisor académico:
Saioa Arrizabalaga
Departamento Tecnun/Grupo CEIT:
CEIT - División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Desarrollo de software, Seguridad.
Descripción y objetivos:
Las herramientas de monitorización y observabilidad son muy utilizadas hoy en día para tener un control de los procesos que se ejecutan en nuestro clúster kubernetes. La mayoría de estas herramientas solo ofrecen una monitorización y observabilidad básica del clúster Kubernetes, pero pocas de ellas aplican detección y contramedida. Este escenario hace que la capacidad de monitorizar la protección de un clúster frente a ataques sea muy baja. Por otro lado, disponemos de herramientas que ofrecen descubrimiento de ataques y alertas, pero sin aplicar ninguna contramedida sobre el mismo. Este proyecto tiene como objetivo el desarrollo de una herramienta de alerta, descubrimiento y contramedida para entornos industriales, y la integración de esta herramienta con herramientas de terceros, capaz de resolver los problemas anteriormente mencionados. Estas funcionalidades deberán integrarse en un clúster kubernetes personalizado para monitorizar y proteger el clúster de ataques externos.
Supervisor académico:
Saioa Arrizabalaga
Departamento Tecnun/Grupo CEIT:
CEIT - División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
5G, Kubernetes, Cloud Computing, Virtualization.
Descripción y objetivos:
La adopción de Cloud Native en los sistemas de telecomunicaciones 5G se ha identificado como un buen candidato para reducir el coste, mejorar la agilidad del sistema y el papel de los servicios 5G. Con base en el estándar 3GPP, el Instituto Europeo de Normas de Telecomunicaciones (ETSI) ha publicado la arquitectura de referencia de la NFV adaptada a los entornos Cloud Native y para mejorar el marco de NFV, incluyendo, contenedores, balanceadores de carga y otros elementos como parte de la arquitectura de referencia.
Este trabajo persigue la validación de la tecnología de contenedores en la plataforma MANO alojada en el ETSI, en un entorno de CN, de manera que los resultados que se obtengan en el trabajo pueden ayudar a animar a los usuarios y a los operadores a utilizar los KNFs y aprovechando de este modo las tecnologías de contenedores.
Supervisor académico:
Saioa Arrizabalaga
Departamento Tecnun/Grupo CEIT:
CEIT - División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Desarrollo de software, Seguridad.
Descripción y objetivos:
CI/CD es cada vez más popular en el desarrollo de software embebido. No obstante, los proyectos suelen estar limitados de un modo que no lo está en el desarrollo de aplicaciones (por ejemplo, web). Además de las limitaciones físicas y computacionales de la plataforma de hardware de destino, existen limitaciones del mercado. El mercado del software embebido tiene requisitos únicos de seguridad, privacidad y ciclos de vida extremadamente largos (por ejemplo, los productos pueden permanecer en el mercado durante décadas). A nivel de desarrollo, el software embebido no es muy diferente que el desarrollo de aplicaciones típicas (por ejemplo, web), ya que requiere IDEs, compiladores, análisis estáticos y dinámicos y herramientas de dinámicas. Sin embargo, las herramientas suelen dirigirse a arquitecturas en las que trabajan (entorno de host vs entorno de destino). La automatización a nivel de compilación utiliza las mismas técnicas, pero cuando hay que ejecutar código, la barrera host/destino se vuelve significativa. La automatización de la ejecución de código requiere un soporte especial desarrollo de software. La automatización de las pruebas de software es más retadora debido a la complejidad de iniciar y pruebas en objetivos integrados, por no mencionar el limitado acceso limitado al hardware de destino que tienen los equipos de software. Este proyecto, pretende llevar a cabo una primera aproximación al desarrollo básico CI/CD sobre sistemas embebidos. De esta forma, dado un desarrollo básico en C/C++, se pretende pasar este código por etapas de testeo, verificaciones de seguridad y compilación (CI), para luego realizar una entrega automatizada sobre un dispositivo (por ejemplo, un microcontrolador), no sin antes realizar también testeos funcionales (CD).
Supervisor académico:
Ainhoa Rezola
Departamento Tecnun/División CEIT:
Tecnun - Departamento de Ingeniería Eléctrica y Electrónica
Área temática:
Diseño electrónico digital, sistemas embebidos, tratamiento de datos
Descripción y objetivos:
El núcleo digital de la etiqueta RFID actualmente en desarrollo está compuesto por múltiples bloques funcionales. Para facilitar el diagnóstico y la resolución de posibles incidencias, resulta fundamental implementar una interfaz de depuración.
El objetivo de este Proyecto Fin de Grado es diseñar y desarrollar dicha interfaz con las siguientes funcionalidades: capturar señales clave de cada bloque funcional y serializarlas para su transmisión mediante un único puerto (o varios, en función de las limitaciones temporales), garantizar que la salida esté bien estructurada para permitir la identificación sencilla de cada señal, y desarrollar una herramienta software que permita extraer e interpretar dichas señales.
Se requieren conocimientos de VHDL y programación básica (Python o MATLAB).
Supervisor académico:
Ainhoa Rezola
Departamento Tecnun/División CEIT:
Tecnun - Departamento de Ingeniería Eléctrica y Electrónica
Área temática:
Diseño electrónico digital, sistemas embebidos, procesado de señal
Descripción y objetivos:
Se ha diseñado una etiqueta RFID personalizada con capacidades de sensado, y el siguiente paso consiste en integrar un pequeño procesador que permita ampliar las funcionalidades de cálculo, especialmente orientadas al procesado de datos procedentes de los sensores.
El estudiante colaborará con el investigador principal en el proceso de integración del procesador con la IP de la etiqueta.
Se requieren conocimientos de VHDL.
Supervisor académico:
Ainhoa Rezola
Departamento Tecnun/División CEIT:
Tecnun - Departamento de Ingeniería Eléctrica y Electrónica
Área temática:
Programación de sistemas embebidos, tratamiento de datos, aplicaciones software
Descripción y objetivos:
Se dispone de una etiqueta RFID personalizada con capacidades de sensado integradas. El objetivo de este Proyecto Fin de Grado es desarrollar una aplicación software que permita extraer y organizar los datos generados por la etiqueta, adaptando la estructura de los datos en función del número y tipo de sensores implicados.
El estudiante trabajará con el firmware tanto del lector RFID como de la propia etiqueta, empleando la API y el código de ejemplo proporcionados. Las principales tareas incluyen: el desarrollo de una aplicación personalizada para interactuar con la etiqueta RFID, la extracción de los bits relacionados con los sensores, y la estructuración de dichos datos para transformar los bits en bruto en valores significativos.
Se requieren conocimientos de programación en C/C++.
Supervisor académico:
Diego Borro
Departamento Tecnun/División CEIT:
CEIT – Visión y Robótica
Descripción y objetivos:
El objetivo del proyecto es analizar en 3D piezas industriales para reconstruir la geometría y hacer un control dimensional (comprobar si la geometría cumple las tolerancias diseñadas). Antes de analizar la imagen, también será necesario estudiar la aplicación concreta para elegir los componentes hardware óptimos (luminaria, óptica, láser y cámara).
Oferta activa solamente cuando se pueda ir a los laboratorios de forma presencial.
Supervisor académico:
Diego Borro
Departamento Tecnun/División CEIT:
CEIT – Visión y Robótica
Descripción y objetivos:
El objetivo del proyecto es hacer uso de la herramienta Inspect Express (de Teledyne Dalsa) para analizar en 2D piezas industriales y encontrar defectos. Esta herramienta permite programar los algoritmos de análisis de imagen de una manera visual a través de su interfaz gráfica. Antes de analizar la imagen, también será necesario estudiar la aplicación concreta para elegir los componentes hardware óptimos (luminaria, óptica y cámara).
Oferta activa solamente cuando se pueda ir a los laboratorios de forma presencial.
Supervisor académico:
Javier Cejudo
Departamento Tecnun/División CEIT:
CEIT – División TIC
Área temática:
Codificación y firmware, IoT, Diseño electrónico, sistemas embebidos, comunicaciones inalámbricas, automatización industrial, seguridad.
Descripción y objetivos:
Programación remota de FPGA desde un microcontrolador, sin la necesidad de utilizar un programador específico. El objetivo principal es implementar la lógica necesaria en un sistema embebido tipo microcontrolador para que éste actúe de programador de una FPGA. Se deberán implementar también las comunicaciones inalámbricas necesarias (Bluetooth, 4G…) para poder realizar esta programación en remoto y que sean accesibles desde cualquier parte del mundo.
Es un proyecto que propone un trabajo sobre elementos físicos y así poder testear y fomentar las habilidades practicas aplicadas.
Supervisor académico:
Iñigo Adin
Departamento Tecnun/División CEIT:
CEIT – División TIC
Área temática:
Superficies inteligentes, Comunicaciones inalámbricas, Simulación electromagnética, Estado del arte, Defensa, Seguridad, Ocultación selectiva, Diseño electrónico
Descripción y objetivos:
Embárcate en un Trabajo de Fin de Carrera pionero explorando el futuro de las comunicaciones y la defensa a través de los entornos inalámbricos programables. Este proyecto se sumerge en las tecnologías que están redefiniendo la interacción con las ondas electromagnéticas, como las Superficies Inteligentes Reconfigurables (RIS), los metamateriales y la emergente RIS Multifuncional (MF-RIS) que integra capacidades de detección para una operación autónoma. Tu misión será realizar una exhaustiva revisión del estado del arte, analizando las técnicas y tendencias fundamentales presentadas en las fuentes, desde la conformación de haces pasiva y la optimización de canales hasta los desafíos en canales de banda ancha y los fenómenos de campo cercano. A partir de esta investigación, deberás proponer aplicaciones innovadoras que aprovechen estas capacidades no solo para revolucionar las comunicaciones 6G, mejorando la cobertura, la seguridad y la eficiencia, sino también para desarrollar sistemas de defensa de vanguardia, incluyendo comunicaciones tácticas seguras, tecnologías de sigilo (stealth) para reducir la detectabilidad radar y acústica, y nuevas formas de guerra electrónica y vigilancia del entorno.
Supervisor académico:
Dr. Emilio Sánchez Tapia
Departamento Tecnun/División CEIT:
CEIT – Visión y Robótica
Área temática:
Automatización/robotización industrial
Descripción y objetivos:
Este proyecto final de grado nace como una continuación directa de un trabajo anterior en el que se automatizó con éxito la misma operación de desatornillado. En esa primera fase, la arquitectura de control se basó en un sistema industrial tradicional, utilizando un PLC para gobernar el robot KUKA. Habiendo validado la viabilidad mecánica y de visión del sistema, este nuevo proyecto se centra en explorar una arquitectura de control alternativa y más flexible.
El nuevo objetivo es, por tanto, abordar el control desde dos perspectivas diferentes para comparar sus prestaciones. En lugar de utilizar el PLC, un controlador especializado, extremadamente fiable y diseñado para operar en tiempo real, se implementará el mismo proceso utilizando ROS (Robot Operating System) en un ordenador convencional. ROS no es un sistema operativo como Windows, sino un conjunto de herramientas de software de código abierto que facilita enormemente la programación de robots y la integración de componentes como cámaras o algoritmos de inteligencia artificial. El alcance final es evaluar y cuantificar las ventajas y desventajas de cada enfoque: la robustez y determinismo del PLC industrial frente a la flexibilidad, rapidez de desarrollo y potencia de procesamiento que ofrece un sistema basado en ROS y un PC.
Tareas a realizar por el alumno:
-
Familiarización con el trabajo anterior
-
Aprendizaje de la técnica de programación del robot Kuka Issy
-
Aprendizaje del uso del sistema operativo ROS
-
Programación desde ROS de la ejecución de una secuencia de trayectorias para atornillar/desatornillar (lenguaje a definir, puede ser en Python o en C++)
-
Testeo y evaluación de las prestaciones conseguidas

Foto del robot colaborativo KUKA que se usará en el PFG.
Supervisor académico:
Adam Podhorski
Área temática:
Sistemas de comunicación
Descripción y objetivos:
El PFG que se propone combina drones, procesamiento de señales y visión artificial. Forma parte de un proyecto para medir ruido externo desde uno o más drones, creando una cámara acústica. Una cámara acústica es un dispositivo que mide el nivel de ruido procedente de distintas direcciones y lo visualiza en forma del mapa del calor junto con la imagen real. Se puede ver un ejemplo aquí: Cámara acústica de GFaI.
¿En qué consiste el proyecto?
• Diseñar y construir una matriz de micrófonos con una cámara integrada.
• Capturar señales con micrófonos PDM (son micrófonos con salida digital).
• Integrar el sistema en un dron y realizar los vuelos de prueba en el polideportivo con fuentes de ruido reales.
• Procesar las señales adquiridas en Matlab para obtener la imagen acústica.
Supervisor académico:
Santiago M Olaizola
Departamento Tecnun/División CEIT:
División Materiales y Fabricación: grupo de Fabricación Láser de Precisión
Área temática:
Procesos de fabricación industrial
Descripción y objetivos:
Nuestra actividad de investigación se centra en el procesamiento de materiales con láser. Para ello, utilizamos pulsos láser ultracortos (láseres de femtosegundos), capaces de producir estructuras muy precisas en superficies de materiales con una definición muy alta del orden del micrómetro. Esto es posible gracias al régimen de proceso de "ablación en frío". Las texturas superficiales de alta definición se pueden utilizar para diversas aplicaciones, como la gestión de la fricción, moldes de inyección de plásticos, implantes, metrología de objetos autolimpiantes, antenas, etc.
El proyecto de investigación ofrecido en este grupo cubre la fabricación, medición y modelado de las estructuras para una aplicación seleccionada. La naturaleza específica del proyecto depende de la duración de la pasantía y de la formación del estudiante. Por ejemplo:
Ingeniería de tecnologías industrial: modificación láser de acero inoxidable para controlar la hidrofobicidad de la superficie, diseño y programación de procesos láser.
Ingeniería de telecomunicación: análisis de la predictibilidad de corrugaciones periódicas en superficies producidas por láseres de femtosegundos, análisis de resultados, control de haz láser.
Campo: aplicaciones láser
Requisitos: sólidos conocimientos de física. Se recomiendan habilidades de programación en Python.
Supervisor académico:
Saioa Arrizabalaga
Departamento Tecnun/División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
5G, Kubernetes, Cloud Computing, Virtualization.
Descripción y objetivos:
La adopción de Cloud Native en los sistemas de telecomunicaciones 5G se ha identificado como un buen candidato para reducir el coste, mejorar la agilidad del sistema y el papel de los servicios 5G. Con base en el estándar 3GPP, el Instituto Europeo de Normas de Telecomunicaciones (ETSI) ha publicado la arquitectura de referencia de la NFV adaptada a los entornos Cloud Native y para mejorar el marco de NFV, incluyendo, contenedores, balanceadores de carga y otros elementos como parte de la arquitectura de referencia.
Este trabajo persigue la validación de la tecnología de contenedores en la plataforma MANO alojada en el ETSI, en un entorno de CN, de manera que los resultados que se obtengan en el trabajo pueden ayudar a animar a los usuarios y a los operadores a utilizar los KNFs y aprovechando de este modo las tecnologías de contenedores.
Supervisor académico:
Saioa Arrizabalaga
Departamento Tecnun/División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Desarrollo de software, Seguridad.
Descripción y objetivos:
CI/CD es cada vez más popular en el desarrollo de software embebido. No obstante, los proyectos suelen estar limitados de un modo que no lo está en el desarrollo de aplicaciones (por ejemplo, web). Además de las limitaciones físicas y computacionales de la plataforma de hardware de destino, existen limitaciones del mercado. El mercado del software embebido tiene requisitos únicos de seguridad, privacidad y ciclos de vida extremadamente largos (por ejemplo, los productos pueden permanecer en el mercado durante décadas). A nivel de desarrollo, el software embebido no es muy diferente que el desarrollo de aplicaciones típicas (por ejemplo, web), ya que requiere IDEs, compiladores, análisis estáticos y dinámicos y herramientas de dinámicas. Sin embargo, las herramientas suelen dirigirse a arquitecturas en las que trabajan (entorno de host vs entorno de destino). La automatización a nivel de compilación utiliza las mismas técnicas, pero cuando hay que ejecutar código, la barrera host/destino se vuelve significativa. La automatización de la ejecución de código requiere un soporte especial desarrollo de software. La automatización de las pruebas de software es más retadora debido a la complejidad de iniciar y pruebas en objetivos integrados, por no mencionar el limitado acceso limitado al hardware de destino que tienen los equipos de software. Este proyecto, pretende llevar a cabo una primera aproximación al desarrollo básico CI/CD sobre sistemas embebidos. De esta forma, dado un desarrollo básico en C/C++, se pretende pasar este código por etapas de testeo, verificaciones de seguridad y compilación (CI), para luego realizar una entrega automatizada sobre un dispositivo (por ejemplo, un microcontrolador), no sin antes realizar también testeos funcionales (CD).

Supervisor académico:
Saioa Arrizabalaga
Departamento Tecnun/División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Desarrollo de software, Privacidad, Automatización de código, contenedores.
Descripción y objetivos:
Fides es una plataforma de código abierto de gestión de la privacidad, que permite aplicar normas de privacidad a nivel de código. Las herramientas de Fides permite etiquetar las características de privacidad del sistema, orquestar el cumplimiento de los derechos programáticos y auditar la información personal identificable almacenada en todos los sistemas e infraestructuras de las aplicaciones. Fides a su vez, es compatible con las principales normativas de privacidad (por ejemplo, GDPR, CCPA y LGPD), y con normas como la ISO 19944 por defecto.
Este proyecto busca la implementación automatizada de la plataforma Fides en un caso de uso práctico, de manera que pueda crearse una definición coherente y versionada de las características y los recursos de privacidad de este sistema, siendo utilizado como parte de un pipeline de CI/CD para procesar las solicitudes de privacidad.
Supervisor académico:
Saioa Arrizabalaga
Departamento Tecnun/División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Desarrollo de software, Seguridad.
Descripción y objetivos:
Las herramientas de monitorización y observabilidad son muy utilizadas hoy en día para tener un control de los procesos que se ejecutan en nuestro clúster kubernetes. La mayoría de estas herramientas solo ofrecen una monitorización y observabilidad básica del clúster Kubernetes, pero pocas de ellas aplican detección y contramedida. Este escenario hace que la capacidad de monitorizar la protección de un clúster frente a ataques sea muy baja. Por otro lado, disponemos de herramientas que ofrecen descubrimiento de ataques y alertas, pero sin aplicar ninguna contramedida sobre el mismo. Este proyecto tiene como objetivo el desarrollo de una herramienta de alerta, descubrimiento y contramedida para entornos industriales, y la integración de esta herramienta con herramientas de terceros, capaz de resolver los problemas anteriormente mencionados. Estas funcionalidades deberán integrarse en un clúster kubernetes personalizado para monitorizar y proteger el clúster de ataques externos.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
La aplicación de covariables dependientes del tiempo en análisis de supervivencia ha mejorado la predicción del tiempo de impago en modelos de scoring crediticio de comportamiento. Sin embargo, cuando estas covariables son endógenas, se producen dos problemas: sesgo en la estimación y la falta de un marco para predecir los valores futuros del evento y las covariables.
Los modelos conjuntos (joint models) son un enfoque estadístico que integra simultáneamente datos longitudinales y de supervivencia, permitiendo modelar la evolución conjunta de un evento de interés (como el tiempo de impago) y de las covariables endógenas dependientes del tiempo. Este proyecto explora por primera vez la aplicación de modelos conjuntos en tiempo discreto al scoring crediticio, y propone una extensión novedosa mediante la inclusión de términos autorregresivos en las covariables endógenas.
El proyecto aplicará estos métodos a datos de hipotecas en EE. UU., evaluando si los modelos conjuntos en tiempo discreto mejoran la precisión predictiva en comparación con los modelos de supervivencia tradicionales y si el rendimiento se optimiza al incluir un término autorregresivo.
Actividades propuestas para el estudiante:
-
Revisión bibliográfica sobre modelos conjuntos y su aplicación en scoring crediticio.
-
Formulación matemática del modelo conjunto en tiempo discreto.
-
Implementación del modelo en R o Python.
-
Análisis de resultados, comparando el rendimiento predictivo frente a otros modelos.
Este proyecto permitirá al estudiante explorar técnicas avanzadas de modelado estadístico aplicadas a datos financieros y mejorar las predicciones en el contexto del riesgo crediticio.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
El problema de cuadrar horarios de mantenimiento, conocido como Problema de Programación de Mantenimiento o Problema de Planificación de Mantenimiento (Maintenance Scheduling Problem), consiste en organizar actividades de mantenimiento dentro de un calendario de manera óptima. Este problema busca minimizar interrupciones y costos operativos, asegurando que tanto el mantenimiento preventivo como el correctivo se realicen en los momentos adecuados.
El objetivo de este proyecto de fin de grado es desarrollar una herramienta de optimización que aborde la programación eficiente de horarios de mantenimiento. La herramienta se desarrollará preferentemente en Python, con opciones adicionales de Matlab o R.
Actividades propuestas para el estudiante:
-
Revisión bibliográfica sobre los problemas y algoritmos de optimización más comunes aplicados en programación de mantenimiento.
-
Formulación matemática del problema, estableciendo los criterios y restricciones relevantes.
-
Implementación de la solución utilizando un algoritmo heurístico de optimización o solvers de código abierto.
-
Análisis de resultados y comparación de la efectividad del enfoque aplicado, con recomendaciones para su uso en distintas situaciones de mantenimiento.
Supervisor académico:
Markos Losada
Departamento Tecnun/División CEIT:
División de Transporte y Energía: Grupo de Transporte y Movilidad Sostenible
Área temática:
diseño electrónico, codificación, tratamiento de datos
Descripción y objetivos:
El planteamiento de este trabajo de fin de grado se centra en el análisis de las tecnologías avanzadas de estimación de distancia que podrían ser integradas en un sistema para una pulsera que permita analizar el juego de Pádel. El proyecto se divide en varias fases, comenzando con un análisis exhaustivo de los sistemas comerciales existentes, evaluando sus ventajas y proponiendo mejoras. La revisión de tecnologías actuales como los sensores de tiempo de vuelo (ToF), Lidar y ultrasonidos es fundamental para seleccionar la tecnología más adecuada para este propósito. La propuesta de mejora incluirá la selección de la tecnología, el desarrollo de un algoritmo específico y la integración del sistema, considerando factores como el tamaño, coste y consumo energético. El objetivo es que el alumno no solo adquiera conocimientos sobre estas tecnologías, sino que también proponga una solución concreta que pueda ser implementada.
En la fase de implementación, el alumno se encargará de integrar los sensores seleccionados y desarrollar un sistema capaz de detectar una matriz de puntos para estimar distancias con precisión. Los resultados obtenidos serán analizados para evaluar la efectividad del algoritmo propuesto y determinar la viabilidad de su implementación en un producto comercial. Este proyecto no solo busca mejorar la experiencia de juego en el pádel, sino también explorar aplicaciones potenciales de estas tecnologías en otros campos, como el pesaje o la monitorización de vagones
Supervisor académico:
Iñigo Adín
Departamento Tecnun/División CEIT:
División de Transporte y Energía: Grupo de Transporte y Movilidad Sostenible
Área temática:
Aprendizaje mediante inteligencia artificial, codificación, tratamiento de datos
Descripción y objetivos:
Este trabajo de fin de grado tiene como objetivo principal el desarrollo y la implementación de modelos de aprendizaje automático en microcontroladores de bajo consumo, específicamente de la familia STM32, utilizando TensorFlow Lite. El proyecto se centra en la aplicación de estos modelos en el sector del transporte, con un enfoque particular en el análisis y mejora de sistemas de frenado automático.
Para alcanzar este objetivo, el alumno deberá:
Formación en Herramientas y Tecnologías:
Adquirir conocimientos sobre TensorFlow Lite para microcontroladores, a través de recursos Machine Learning como la documentación de Andrew Ng, y "Aprendizaje Automático con Scikit-Learn, Keras y TensorFlow", como base y utilizando "Python para el Análisis de Datos" de Wes McKinney como referencia para el manejo y análisis de datos.
Desarrollo de Modelos de Aprendizaje Automático:
Diseñar y entrenar modelos de aprendizaje automático que puedan ser optimizados para su ejecución en microcontroladores de bajo consumo.
Evaluar el rendimiento de estos modelos en términos de precisión, eficiencia y consumo energético. Para ello, se tomarán datos con una bancada de frenos sensorizada y se entrenarán los modelos con ellos
Integración en Microcontroladores:
Implementar los modelos desarrollados en microcontroladores STM32 utilizando TensorFlow Lite. Asegurar que la integración sea eficiente en términos de recursos y resultados de fiabilidad de los resultados.
Aplicación en el Sector del Transporte:
Aplicar los modelos integrados para mejorar la función de frenado automático en vehículos, analizando datos en tiempo real para optimizar la seguridad y eficiencia del sistema.
Evaluar el impacto de la implementación en escenarios de prueba, ajustando los modelos según sea necesario para mejorar el rendimiento.
La documentación uy resultados se organizarán documentando las referencias y el proceso de desarrollo. Se presentarán los resultados obtenidos, destacando las mejoras logradas en la función de frenado automático y las posibles aplicaciones futuras de la tecnología desarrollada.
Supervisor académico:
Emilio Sánchez Tapia
Departamento Tecnun/División CEIT:
División de Materiales y Fabricación: Grupo de Robótica y Control Industrial
Área temática:
Ingeniería Robótica
Descripción y objetivos:
En el contexto de la robótica del siglo XXI, surge el concepto de la fábrica conectada donde coexisten máquinas, robots móviles y humanos. Los robots móviles pueden o no constar de un brazo manipulador robótico o MoMa (MObile MAnipulator, MAnipulador MÓvil). En el caso de sólo existir el robot móvil se suele hablar de AMR (Autonomous Mobile Robot) o AGV (Autonomous Guide Vehicle) según su grado de libertad en la navegación (ver siguiente figura).

Figura 1: Elementos constitutivos de un robot colaborativo sobre plataforma (o MoMa).
La principal aplicación de este tipo de dispositivos es incrementar el nivel de automatización de la fábrica en sectores que a fecha de hoy la automatización tiene baja penetración, como puede ser la intralogística y machine tending. En estos escenarios el robot puede trasladar materias primas, productos en proceso de fabricación o incluso buscar piezas de reemplazo de máquinas (como por ejemplo un cabezal de corte para un CNC). En cualquier caso, el MoMa podrá hacer la tarea o bien de forma autónoma o bien como asistente de un operario humano (ver siguiente figura).

Figura 2: Escenario de fábrica donde un MoMa se convierte en un recurso más de la fábrica donde puede él trabajar sólo o en colaboración de otros operarios humanos.
Un escenario probable es que en la fábrica nos encontremos más de un robot móvil, cada uno de ellos con distintas capacidades y probablemente de distintos fabricantes. En este caso es importante contar con un software que coordine las tareas y las reparta adecuadamente según la disponibilidad y/o capacidad de cada robot. Dicho software es conocido con el nombre de gestor de flotas de robots.

Figura 3: Un gestor de flotas coordina el trabajo de un conjunto de robots.
Existen en el mercado numerosas soluciones para gestores de flota, pero suelen ser propietarias y compatibles con sólo una marca de robots.
El objetivo del proyecto final de grado es desplegar y testear un gestor de flotas robótico de código abierto (open-source). Los test se harán tanto en simulación como con robots reales.
A fecha de redacción del presente documento, se prevé utilizar open-rmf (Open-RMF: https://www.open-rmf.org/ ) o equivalente, ver siguiente figura.

Figura 4: Pantallazo de una simulación de flotas coordinadas desde open-rmf.
Se ofrece, durante la ejecución del proyecto:
-
Incorporación al grupo de robótica de investigadores del CEIT
-
Formación en las herramientas de software/hardware empleadas
-
Posibilidad de oferta de trabajo en una empresa del sector
Los Testbed son elementos fundamentales para la realización de pruebas de seguridad. Sin embargo, una primera aproximación consiste en verificar la viabilidad del Testbed con base al desarrollo de pruebas de rendimiento.
El siguiente trabajo pretende crear un Testbed para la realización de pruebas de rendimiento con base a la integración del gemelo digital de una Turbina Eólica a modo de Hardware In The Loop (HIL), un PLC virtual como OpenPLC y un conjunto de clientes Modbus, que permitirán la realización de pruebas de escalabilidad. La siguiente figura muestra una arquitectura de referencia con los componentes participantes del Testbed.

Figura 1: Flujo de comunicación.
Concretamente, el gemelo digital de turbina eólica a integrar es el siguiente:

Figura 2: Generador eólico creado sobre Matlab Simulink.

Figura 3: Ataques sobre PLC virtual/real.
El proyecto involucraría una segunda aproximación utilizando un PLC real, es decir, cambiando el PLC virtual (OpenPLC) por un PLC real Omron. El resto de los procedimientos de experimentación serían idénticos. De esta forma se podría utilizar uno de los entornos como benchmark para establecer una comparativa con respecto al otro. A continuación, se listan las tareas a desarrollar:
- Analizar el repositorio base, comprendiendo la forma de generar flujos de información.
- Paquetizar en un contenedor un generador eólico desarrollado en Matlab Simulink (ver Figura 2).
- Agregar los componentes necesarios para establecer comunicación UDP entre el modelo de simulink (paquetizado) y las interfaces (ver Figura 1).
- Desarrollar el código de control necesario en el PLC virtual para habilitar la comunicación con la turbina eólica.
- Conectar el PLC virtual con los clientes Modbus, creados usando la librería pymodbus, para habilitar las pruebas de rendimiento.
- Recolección de métricas de pruebas de rendimiento para la realización de análisis.
- Transformar el código de control creado para el PLC virtual en el código necesario para el PLC real de manera que se habilite la comunicación con la turbina eólica.
- Conectar el PLC real con los clientes Modbus, creados usando la librería pymodbus, para habilitar las pruebas de rendimiento.
- Recolección de métricas de pruebas de rendimiento para la realización de análisis.
- Recolectar herramientas que permitan explotar vulnerabilidades existentes sobre el PLC virtual/real (ver Figura 3).
- Realización de pruebas de seguridad clasificándolas según el pilar de la ciberseguridad que comprometen, por ejemplo, disponibilidad, integridad, etc (ver Figura 3).
Los Testbed son elementos fundamentales para la realización de pruebas de seguridad. Concretamente el ámbito de robótica colaborativa constituye un entorno Safety de mucho interés para la investigación en ciberseguridad. Actualmente se están teniendo progresos en esta dirección, trabajando en un flujo como el que se muestra en la Figura 1.

Figura 1: Testbed para realización de pruebas de ciberseguridad sobre entornos de robótica colaborativa.
Sin embargo, aún queda bastante camino por recorrer en varias de estas etapas. En este trabajo se pretende estudiar a profundidad una de ellas. Concretamente, la comunicación dispositiva de campo (robot) con el Gateway IoT, es decir, el flujo representado en la Figura 2. A continuación se definen las principales tareas a acometer en este trabajo:

Figura 2: Área de mejora del Testbed.
1- Dado que Universal Robots ha liberado una serie de simuladores, nos interesaría saber, cuál de todas es la serie o ROBOT_MODEL que nos permitiría tener un mayor control sobre el dispositivo de campo, lo cual se traduce en mayor capacidad de lectura/escritura sobre las variables del dispositivo.
2- Obtención y almacenamiento de registros (logs) del robot como elemento clave para la realización de análisis durante las pruebas de seguridad. Estos registros deben permitir una monitorización activa del dispositivo.
3- Considerando una Raspberry Pi como Gateway IoT se instalará en esta una infraestructura basada en K3s. Sobre esta infraestructura K3s deberá desplegarse una arquitectura basada en microservicios las cual contendrá 4 microservicios: cliente Modbus, Publisher de Kafka, consumer de Kafka, Engine. Nota: Esta tarea se desarrollará en colaboración con otros investigadores del grupo para llevar a cabo una implementación que integre la metodología CI/CD para habilitar las actualizaciones automáticas sobre la Raspberry.
4- Se instalará un módulo 5G en las Raspberry para habilitar la comunicación con la central Amarisoft. Nota: Esta tarea depende del proceso de compra del módulo.
5- Considerando Modbus como protocolo de transporte entre el dispositivo de campo y el Gateway IoT la siguiente tarea busca la mejora del código actualmente generado (paquetizado en un contenedor) para monitorizar con cierta periodicidad el conjunto de variables que habilita el robot.
6- Estas variables serán recolectadas y enviadas a un segundo microservicio el cual utiliza el protocolo Kafka, el cual deberá ser optimizado programáticamente para reducir latencia y aumentar el throughput. Para testear este microservicio deberá usarse el bróker de prueba ejemplificado en la Figura 3.
7- Se integrará un tercer microservicio que actuará como publisher de Kafka el cual también deberá ser optimizado. Para testear este microservicio deberá usarse el bróker de prueba ejemplificado en la Figura 3.
8- Se deberá desarrollar un cuarto microservicio que actuará como motor de respuestas el cual dependerá de la predicción recibida desde el consumer de Kafka, con base a la cual deberá tomar decisiones que serán transmitidas al cliente Modbus y trasladadas al dispositivo de campo como muestra la Figura 3.

Figura 3: Integración de Engine sobre el Testbed.
9- Integración del Gateway IoT sobre el flujo de comunicación del caso de uso como muestra la Figura 4. Nota: Esta tarea depende de progresos de otros investigadores del grupo.

Figura 4: Testbed con flujo de comunicación completo.
Supervisor académico:
Enrique Castaño Carmona
División CEIT:
Advance Powder Metallurgy and Laser Manufacturing Group
Área temática:
Informática, modelización y simulación
Descripción y objetivos:
El mecanizado de materiales mediante el uso de láseres de pulso ultracorto es una tecnología de muy reciente desarrollo y que abre múltiples posibilidades en el ámbito de las superficies funcionales, tales como superficies de bajo coeficiente de fricción en aerogeneradores o superficies anti-hielo en aeronáutica.
Actualmente, Ceit lidera un proyecto europeo en el que uno de sus objetivos es desarrollar un software de simulación del proceso de mecanizado con este tipo de láseres. El modelado matemático del proceso se encuentra ya muy avanzado, así como su implementación numérica.
La tarea de este PFG será diseñar y desarrollar la interfaz gráfica con el usuario del programa de simulación de forma que su utilización resulte fácil e intuitiva. El estudiante aplicará y ampliará sus conocimientos de programación en Python, GUI (Graphic User Interface) y diseño UX/UI (User Experience/User Interface) para conseguir una interfaz que posibilite al usuario una experiencia atractiva del programa de simulación.
Supervisor académico:
Santiago Figueroa Lorenzo
División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Desarrollo de software, Seguridad.
Descripción y objetivos:
CI/CD es cada vez más popular en el desarrollo de software embebido. No obstante, los proyectos suelen estar limitados de un modo que no lo está en el desarrollo de aplicaciones (por ejemplo, web). Además de las limitaciones físicas y computacionales de la plataforma de hardware de destino, existen limitaciones del mercado. El mercado del software embebido tiene requisitos únicos de seguridad, privacidad y ciclos de vida extremadamente largos (por ejemplo, los productos pueden permanecer en el mercado durante décadas). A nivel de desarrollo, el software embebido no es muy diferente que el desarrollo de aplicaciones típicas (por ejemplo, web), ya que requiere IDEs, compiladores, análisis estáticos y dinámicos y herramientas de dinámicas. Sin embargo, las herramientas suelen dirigirse a arquitecturas en las que trabajan (entorno de host vs entorno de destino). La automatización a nivel de compilación utiliza las mismas técnicas, pero cuando hay que ejecutar código, la barrera host/destino se vuelve significativa. La automatización de la ejecución de código requiere un soporte especial desarrollo de software. La automatización de las pruebas de software es más retadora debido a la complejidad de iniciar y pruebas en objetivos integrados, por no mencionar el limitado acceso limitado al hardware de destino que tienen los equipos de software. Este proyecto, pretende llevar a cabo una primera aproximación al desarrollo básico CI/CD sobre sistemas embebidos. De esta forma, dado un desarrollo básico en C/C++, se pretende pasar este código por etapas de testeo, verificaciones de seguridad y compilación (CI), para luego realizar una entrega automatizada sobre un dispositivo (por ejemplo, un microcontrolador), no sin antes realizar también testeos funcionales (CD).

Supervisor académico:
Santiago Figueroa Lorenzo
División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Desarrollo de software, Privacidad, Automatización de código, contenedores.
Descripción y objetivos:
Fides es una plataforma de código abierto de gestión de la privacidad, que permite aplicar normas de privacidad a nivel de código. Las herramientas de Fides permite etiquetar las características de privacidad del sistema, orquestar el cumplimiento de los derechos programáticos y auditar la información personal identificable almacenada en todos los sistemas e infraestructuras de las aplicaciones. Fides a su vez, es compatible con las principales normativas de privacidad (por ejemplo, GDPR, CCPA y LGPD), y con normas como la ISO 19944 por defecto.
Este proyecto busca la implementación automatizada de la plataforma Fides en un caso de uso práctico, de manera que pueda crearse una definición coherente y versionada de las características y los recursos de privacidad de este sistema, siendo utilizado como parte de un pipeline de CI/CD para procesar las solicitudes de privacidad.
Supervisor académico:
Santiago Figueroa Lorenzo
División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Desarrollo de software, Seguridad.
Descripción y objetivos:
Las herramientas de monitorización y observabilidad son muy utilizadas hoy en día para tener un control de los procesos que se ejecutan en nuestro clúster kubernetes. La mayoría de estas herramientas solo ofrecen una monitorización y observabilidad básica del clúster Kubernetes, pero pocas de ellas aplican detección y contramedida. Este escenario hace que la capacidad de monitorizar la protección de un clúster frente a ataques sea muy baja. Por otro lado, disponemos de herramientas que ofrecen descubrimiento de ataques y alertas, pero sin aplicar ninguna contramedida sobre el mismo. Este proyecto tiene como objetivo el desarrollo de una herramienta de alerta, descubrimiento y contramedida para entornos industriales, y la integración de esta herramienta con herramientas de terceros, capaz de resolver los problemas anteriormente mencionados. Estas funcionalidades deberán integrarse en un clúster kubernetes personalizado para monitorizar y proteger el clúster de ataques externos.
Supervisor académico:
Santiago Figueroa Lorenzo
División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
5G, Kubernetes, Cloud Computing, Virtualization.
Descripción y objetivos:
La adopción de Cloud Native en los sistemas de telecomunicaciones 5G se ha identificado como un buen candidato para reducir el coste, mejorar la agilidad del sistema y el papel de los servicios 5G. Con base en el estándar 3GPP, el Instituto Europeo de Normas de Telecomunicaciones (ETSI) ha publicado la arquitectura de referencia de la NFV adaptada a los entornos Cloud Native y para mejorar el marco de NFV, incluyendo, contenedores, balanceadores de carga y otros elementos como parte de la arquitectura de referencia.
Este trabajo persigue la validación de la tecnología de contenedores en la plataforma MANO alojada en el ETSI, en un entorno de CN, de manera que los resultados que se obtengan en el trabajo pueden ayudar a animar a los usuarios y a los operadores a utilizar los KNFs y aprovechando de este modo las tecnologías de contenedores.
Supervisor académico:
Gorka de Miguel
División CEIT:
Transporte y movilidad sostenible
Área temática:
Ingeniería de telecomunicación
Descripción y objetivos:
El uso de los sistemas de posicionamiento es cada vez más habitual en el día a día tanto de las personas como de las empresas, las cuáles los integran en sus sistemas como piezas clave a la hora de querer un grado de seguridad y eficiencia que cumpla con las expectativas del mercado. En este sentido, los grandes actores del sector ferroviario (CAF, Thales, SNCF, Siemens, etc.) están dedicando grandes esfuerzos al posicionamiento preciso y continuo de sus trenes.
Al basar principalmente sus sistemas de posicionamiento en tecnologías GPS/GNSS, el mayor reto a afrontar se encuentra en poder localizar los receptores en entornos interiores, donde la señal satelital se ve degradada. Actualmente, Ceit se encuentra inmerso en una gran iniciativa europea en la que se busca desarrollar sistemas de posicionamiento totales, que funcionen tanto en interiores como en exteriores, y que lo hagan de forma precisa y continuada, con el fin de poder alcanzar el mayor grado de madurez en el camino hacia el tren autónomo.
El cometido de este PFG sería diseñar e implementar un sistema de posicionamiento basado en WiFi que funcione en interiores y pueda fusionarse posteriormente con tecnologías GPS/GNSS.
Supervisor académico:
Gorka de Miguel
División CEIT:
Transporte y movilidad sostenible
Área temática:
Ingeniería de telecomunicación
Descripción y objetivos:
El uso de los sistemas de posicionamiento es cada vez más habitual en el día a día tanto de las personas como de las empresas, las cuáles los integran en sus sistemas como piezas clave a la hora de querer un grado de seguridad y eficiencia que cumpla con las expectativas del mercado. En este sentido, los grandes actores del sector ferroviario (CAF, Thales, SNCF, Siemens, etc.) están dedicando grandes esfuerzos al posicionamiento preciso y continuo de sus trenes.
Al basar principalmente sus sistemas de posicionamiento en tecnologías GPS/GNSS, el mayor reto a afrontar se encuentra en poder localizar los receptores en entornos interiores, donde la señal satelital se ve degradada. Actualmente, Ceit se encuentra inmerso en una gran iniciativa europea en la que se busca desarrollar sistemas de posicionamiento totales, que funcionen tanto en interiores como en exteriores, y que lo hagan de forma precisa y continuada, con el fin de poder alcanzar el mayor grado de madurez en el camino hacia el tren autónomo.
El cometido de este PFG sería realizar un estudio del uso de la tecnología 5G para el posicionamiento en interiores e implementar un algoritmo de posicionamiento basado en 5G que haga uso de señales sintéticas simuladas mediante Matlab.
Supervisor académico:
Gorka de Miguel
División CEIT:
Transporte y movilidad sostenible
Área temática:
Ingeniería de telecomunicación
Descripción y objetivos:
El uso de los sistemas de posicionamiento es cada vez más habitual en el día a día tanto de las personas como de las empresas, las cuáles los integran en sus sistemas como piezas clave a la hora de querer un grado de seguridad y eficiencia que cumpla con las expectativas del mercado. En este sentido, los grandes actores del sector ferroviario (CAF, Thales, SNCF, Siemens, etc.) están dedicando grandes esfuerzos al posicionamiento preciso y continuo de sus trenes.
Al basar principalmente sus sistemas de posicionamiento en tecnologías GPS/GNSS, un gran reto a afrontar es el de obtener precisiones centimétricas de forma continuada de forma global. Actualmente, Ceit se encuentra inmerso en una gran iniciativa europea en la que se busca desarrollar sistemas de posicionamiento totales, que sean capaces de localizar trenes de forma ultraprecisa en su misión a lo largo de las vías, con el fin de poder alcanzar el mayor grado de madurez en el camino hacia el tren autónomo.
El cometido de este PFG sería implementar un algoritmo de decodificación de las señales de augmentación HAS de los satélites Galileo para el posicionamiento ultrapreciso, y su aplicación a un algoritmo de posicionamiento en Matlab ya funcional basado en señales GPS/GNSS.
Supervisor académico:
Yuemin Ding
Departamento Tecnun:
Electrical and Electronic Engineering
Área temática:
Telecommunication
Descripción y objetivos:
Online monitoring and data collection in ultra-remote areas is specifically meaningful to investigate the local characteristics of climate change, biodiversity evolution, etc. It is also very important to prevent huge disasters, such as wildfires. However, online monitoring and data collection in ultra-remote areas have been challenging during the past decades. A major challenge is the lack of digital infrastructure for communication and data collection. However, the emerging satellite networking (such as Starlink) and low-power and long-distance IoT (such as MIoTy) technologies enable an alternate solution for online monitoring and data collection. The aim of this project is to develop a system based on satellite networks and low-power and long-distance IoT to enable online monitoring and data collection in ultra-remote areas.
Supervisor académico:
Leticia Zamora Cadenas – Iker Aguinaga Hoyos.
División CEIT:
Tecnologías de la Información y Comunicación. Grupo de Sistemas Inteligentes para Industria 4.0.
Área temática:
Ingeniería de Telecomunicación/Industrial
Descripción y objetivos:
Los sistemas de localización para interiores son un elemento en auge en los últimos años. Ya sea mediante tecnologías de radiofrecuencia, sensores inerciales o sistemas de visión artificial, la localización de objetos o personas en espacios interiores es un elemento clave en muchas aplicaciones (tracking de piezas, accesos a zonas de seguridad, seguimiento de personas, realidad aumentada, etc.).
Para determinar y evaluar la precisión de un sistema de localización, lo más habitual es recurrir a la medida manual de unos puntos de control o test en un entorno controlado, que permitan determinar la precisión del mismo. Sin embargo, este tipo de medidas siempre están sujetas a errores en la medida, errores humanos, y la imposibilidad de seguir un elemento que se mueve en tiempo real. Otra opción muy extendida, sobre todo cuando se quiere evaluar la precisión en dinámico, es recurrir a sistemas de gran coste económico que permitan crear el recorrido real o “ground truth”, como, por ejemplo, sistemas de seguimiento mediante visión. Sin embargo, no siempre es posible un despliegue de este tipo de sistemas, o no se dispone de los medios económicos para ello. Es por ello que, poder evaluar la precisión de los sistemas de posicionamiento en interiores con un coste bajo, sigue siendo un problema que investigadores y empresas intentan resolver.
Actualmente Ceit tiene una línea de investigación asociada a los sistemas de posicionamiento para espacios interiores, en la que trabaja con diversas empresas para dar solución a sus necesidades. Es por ello que nace la necesidad de tener un sistema de “ground truth” sencillo de instalar y de coste no elevado.
El cometido de este PFG sería desarrollar un sistema de “ground truth”, mediante el uso de sistemas de realidad virtual/aumentada, para su posterior uso en la evaluación de la precisión del sistema de localización en interiores del que es propietario Ceit. Se dispone del hardware HTC Vice, Oculus Quest y Hololens 2 para el desarrollo de este sistema empleando la plataforma de programación Unity3D. El candidat@ deberá tener conocimientos de programación en lenguaje C# o en lenguajes similares como C++ o Java.
Supervisor académico:
Emilio Sánchez Tapia
División CEIT:
Tecnologías de información y comunicaciones. Grupo de Sistemas Inteligentes para Industria 4.0. Subgrupo de Visión y Robótica
Área temática:
Ingeniería Robótica
Descripción y objetivos:
La industria 4.0 ha abierto camino a múltiples formas de automatización que tienen como objetivo mejorar la productividad y optimizar los procesos de trabajo. En este contexto, se pretende desarrollar un manipulador móvil inteligente: un nuevo tipo de robot que integra la tecnología de un robot móvil autónomo y un brazo robótico colaborativo muy eficiente capaz de realizar diversas operaciones.
La idea del proyecto es desarrollar un robot que pueda desplazarse, detectar y evitar obstáculos, explorar su entorno para reconocer objetos a través de la visión artificial y llevar a cabo tareas de manipulación de piezas, siendo capaz de interactuar con los operarios. Con la idea de implantar un modelo de transformación digital, exigido hoy en día en entornos de fábrica reales, los robots, elementos de control, sensores y el resto de elementos embarcados estarán conectados entre ellos a través de una plataforma digital para tener un control del proceso en tiempo real y desde cualquier lugar.
Actualmente CEIT tiene ya desarrollado un primer prototipo funcional (ver siguiente figura).

El cometido de este PFG sería la programación bajo ROS-2 de una secuencia de tareas para que el robot interactúe con una celda robotizada clásica. El caso concreto a desarrollar será que el robot vaya a un repositorio de piezas a procesar, las acerque a la celda, espere su procesamiento y las lleve a otro almacén de piezas ya clasificadas.
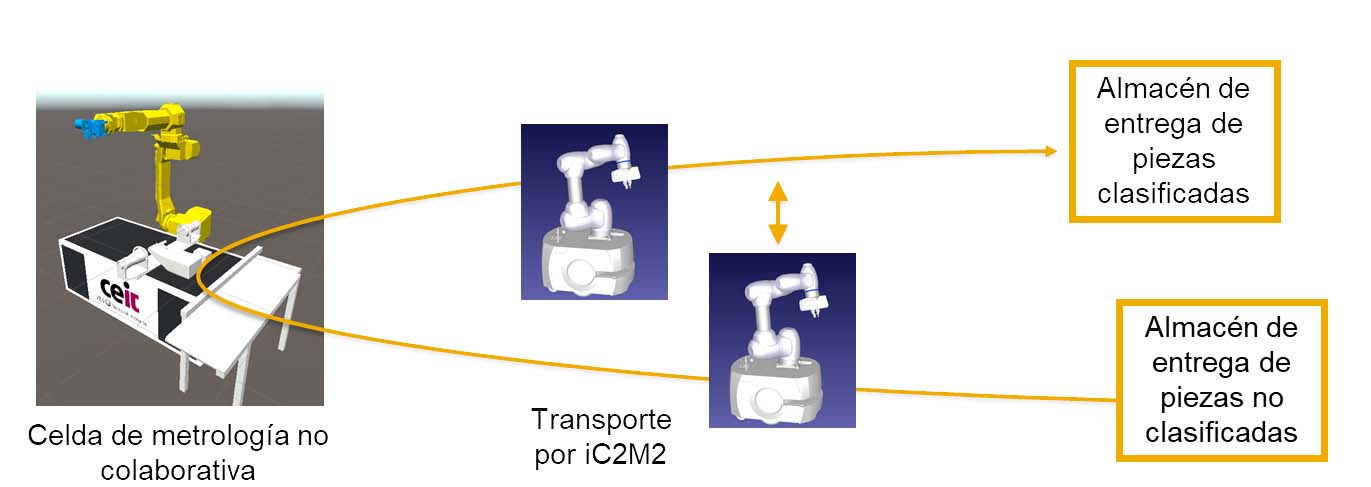
Bajo esta tarea simple, se probarán conceptos de:
- Robótica móvil colaborativa
- Machine tending
- Control en fuerza
- Problemática de sincronización de dos dispositivos automáticos
Se requiere conocimientos de programación en C/C++, Python o java-script.
Supervisor académico:
Diego Borro
División CEIT:
Sistemas Inteligentes para la Industria 4.0
Área temática:
Ingeniería en Sistemas de Telecomunicación
Descripción y objetivos:
Copernicus es, a día de hoy, el programa más importante de Observación de la Tierra a nivel mundial. El programa es una iniciativa conjunta de la Comisión Europea y de la Agencia Espacial Europea (ESA) que persigue construir un sistema autónomo de observación de la Tierra. El programa Copernicus se apoya en una familia de satélites llamados Sentinel, propiedad de la Unión Europea y desarrollados para satisfacer las necesidades de los servicios Copernicus y de sus usuarios.
Cada objeto de la superficie de la Tierra refleja y absorbe energía en diversas formas. La firma espectral representa la forma única en la que una superficie refleja la energía del sol, dentro del espectro electromagnético. Además, las firmas espectrales típicamente se caracterizan en una gráfica de eje X (largo de onda) e Y (porciento de reflectancia) de modo que diferentes superficies tienen distintas firmas espectrales.
Actualmente existen multitud de datos, herramientas y software,… para acceder a los datos de los satélites y procesarlos. El objetivo de este PFG sería acceder a la información multiespectral de cierta zona del planeta y procesarla para obtener cierta información como cambios en la cobertura del suelo, el crecimiento de algas en el agua, diferentes tipos de cultivos, o la cantidad de desarrollo urbano en un área. La información concreta necesaria depende de la aplicación y se definirá cuando empiece el PFG.
El alumno no empezará de cero ya que se ha defendido un PFM que ha realizado un estudio del arte de todas las tecnologías y herramientas existentes.