Ofertas en: Ingeniería en Electrónica Industrial
Supervisor académico:
José Martín Echeverría Ormaechea
Departamento Tecnun/Grupo CEIT:
CEIT: División de Transporte y Energía
Área temática:
Electrónica de Potencia, Actuadores Piezoeléctricos, Posicionamiento nanométrico
Descripción y Objetivos:
Los actuadores piezoeléctricos utilizados en sistemas de posicionamiento de alta precisión requieren etapas de potencia capaces de suministrar tensiones elevadas —habitualmente entre 100 V y 150 V— y corrientes transitorias asociadas a su naturaleza predominantemente capacitiva. Aunque existen controladores comerciales para este tipo de actuadores, muchos presentan configuraciones cerradas y limitadas que dificultan la optimización de su comportamiento o la incorporación de nuevas funcionalidades específicas.
El objetivo principal del proyecto es desarrollar y validar un sistema completo de electrónica de potencia que permita la excitación precisa y segura de actuadores piezoeléctricos destinados a aplicaciones de posicionamiento. El sistema deberá generar señales de control programables (unipolares o bipolares), operar sobre rangos de tensión adecuados para diferentes tipos de actuadores, y proporcionar una respuesta dinámica que permita evaluar el comportamiento tanto estático como transitorio del dispositivo.
La etapa de potencia incluirá:
-
Implementación de etapa de conversión de tensión a niveles adecuados para la excitación piezoeléctrica (p. ej., topologías boost, flyback o fuentes lineales de alta tensión).
-
Diseño de la etapa de amplificación capaz de suministrar corriente reactiva y mantener la linealidad requerida para aplicaciones de precisión.
-
Implementación de sistemas de control y modulación, necesarios para generar rampas, perfiles dinámicos o señales sinusoidales de prueba.
-
Sensado y monitorización interna de parámetros clave, como tensión aplicada, corriente instantánea o temperatura del sistema.
Este proyecto permitirá al estudiante profundizar en el diseño de convertidores de potencia de alta tensión, electrónica analógica de precisión, control de cargas capacitivas y técnicas de protección, obteniendo como resultado un módulo de accionamiento piezoeléctrico totalmente funcional y documentado.
Supervisor académico:
Héctor Solar
Departamento Tecnun/Grupo CEIT:
Tecnun: Departamento de Ingeniería Eléctrica y Electrónica
Área temática:
Diseño electrónico
Descripción y objetivos: El objetivo de este proyecto es el diseño de un mixer y la integración del mismo con un amplificador de bajo ruido (LNA), para desarrollar el front-end analógico (recuadro en rojo) de un sistema de lectura de qubits semiconductores. Específicamente, se desarrollará la electrónica para qubits de espín de electrones. La herramienta de diseño es CADENCE, y la tecnología a utilizar es IHP SiGe BiCMOS 0.35um, pues tiene modelos para temperaturas de 4K. El estudiante deberá de realizar el diseño esquemático, optimizar su rendimiento, diseñar el layout e integrarlo con el LNA.

Supervisor académico:
Ainhoa Galarza
Departamento Tecnun/Grupo CEIT:
CEIT: División de Transporte y Energía
Área temática:
Automatización Industrial
Descripción y objetivos:
Los convertidores de potencia para aplicaciones de automoción suelen comunicarse con el exterior a través de buses como CAN, puerto serie o Ethernet. El desarrollador puede enviar comandos y recibir información desde un ordenador para diagnosticar el equipo, pero con aplicaciones muy rudimentarias. El propósito principal del proyecto es desarrollar una aplicación de PC que permita gestionar las comunicaciones con el convertidor, y al mismo tiempo interactúe con los dispositivos del banco de ensayos (fuentes de tensión, osciloscopios, etc.).
La aplicación debe ejecutar de forma autónoma ensayos programados previamente mediante el envío de secuencias de comandos a todos los elementos del banco; permitir visualizar datos en tiempo real ajustando canales, escalas y unidades; y exportar datos para mantener un registro seguro de toda la actividad, tanto de la operación del convertidor como capturas de formas de onda del osciloscopio en momentos específicos del ensayo. Las secuencias del ensayo se establecerán de forma amigable en el entorno de la aplicación, permitiendo incorporar lógica condicional para adaptar el flujo de pruebas a las condiciones detectadas durante la ejecución.
Todas las acciones, errores y resultados quedarán registrados en un sistema de logs, lo que facilitará la auditoría y el seguimiento de las pruebas realizadas
Supervisor académico:
Isabel Ayerdi - Aitor Larrañaga Jaio
Departamento Tecnun/Grupo CEIT:
CEIT: División Materiales y Fabricación: grupo de Fabricación Láser de Precisión
Área temática:
Automatización Industrial, Metrología óptica, Perfilometría, Caracterización de Materiales, Control de calidad, Ciencia de datos, Inteligencia Artificial
Descripción y objetivos:
La optimización y control de procesos láser mediante modelos de IA requiere vastos conjuntos de datos que vinculen los parámetros de entrada (potencia, velocidad de escaneo, frecuencia, pitch, etc.) con las métricas de calidad de salida. El estudiante colaborará en la creación de una base de datos de micromecanizado de alta precisión a partir de muestras grabadas con diversas condiciones láser.
La labor principal del estudiante será el desarrollo y la estandarización de una herramienta metodológica de automatización que interactúe con el perfilómetro 3D Sensofar S Neox para caracterizar de forma masiva y repetible las muestras de micromecanizado láser. El estudiante deberá configurar e implementar las rutinas en el software Sensofar que permitan automatizar la adquisición de datos de perfilometría 3D y el procesamiento posterior para la extracción de métricas clave (profundidad, rugosidad, ángulos, etc.).
Este proceso eliminará la necesidad de mediciones manuales, creando un flujo de datos limpio, estructurado y robusto, que alimentará una base de datos para la creación de una IA. Si la automatización se consigue rápidamente, el proyecto incluirá una fase de implementación de IA básica sobre los datos generados en Python.
Objetivos:
-
Estandarizar y documentar el protocolo de adquisición utilizando las Recetas MMR (Multiple Measurement Routine) de SensoSCAN para la automatización del stage XY y la secuencia de medición.
-
Desarrollar e implementar las Recetas de Análisis en SensoPRO para el cálculo automático y la extracción de las métricas de calidad (rugosidad, profundidad, ángulos de pared) a partir de los datos obtenidos.
-
Crear el workflow de datos que combine los parámetros de proceso (entrada) con las métricas de calidad (salida) en un dataset estructurado y listo para el Machine Learning.
Si el tiempo lo permite, implementar un algoritmo sencillo de Machine Learning para realizar la primera predicción de calidad sobre el dataset generado
Supervisor académico:
Luis Vitores Valcárcel García / Cristina Rodriguez
Departamento Tecnun/Grupo CEIT:
CEIT – División TIC / PTM
Área temática:
Optimización Matemática, Data Science, Materiales
Descripción y Objetivos:
Desarrollo de una aplicación de software robusta (preferentemente en Python) para la optimización de parámetros de ecuaciones constitutivas de materiales (modelos conocidos en la literatura).
El objetivo es automatizar la tarea de ajustar modelos a datos experimentales (leídos desde Excel/CSV) para predecir propiedades mecánicas. Se requiere comparar distintos algoritmos de optimización para determinar la mejor estrategia de ajuste. El proyecto debe integrarse o ser la base de una aplicación existente.
Actividades Propuestas:
-
Revisión bibliográfica de modelos constitutivos y algoritmos de optimización.
-
Formulación matemática del problema de optimización (función de error).
-
Implementación de la lectura de datos (Excel/CSV) y de las ecuaciones constitutivas.
-
Implementación y comparación de, al menos, dos algoritmos de optimización (e.g., Levenberg-Marquardt vs. Algoritmos Genéticos).
-
Desarrollo de la interfaz de usuario para la carga, ajuste y visualización de resultados.
-
Validación y análisis de la efectividad del software y los algoritmos aplicados.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/Grupo CEIT:
División TIC
Área temática:
Optimización Matemática, Data Science
Descripción y Objetivos:
Desarrollo de una aplicación en Python para automatizar el análisis exploratorio de datos (EDA) y el modelado predictivo de regresión.
El objetivo es construir una herramienta capaz de leer una base de datos (CSV/SQL), clasificar variables automáticamente (numéricas, categóricas), realizar estudios estadísticos univariantes y bivariantes (correlaciones, gráficos) y, finalmente, aplicar y comparar automáticamente modelos de regresión para una variable de interés. La meta es ofrecer un software robusto para el inicio rápido de proyectos de Data Science.
Actividades Propuestas:
-
Revisión de técnicas de AutoEDA y AutoRegresión.
-
Módulo de Ingesta: Lectura de datos y clasificación automática de variables.
-
Módulo EDA: Implementación de estudios estadísticos y gráficos automáticos (univariantes y de relación entre variables).
-
Módulo de Regresión: Preprocesamiento automático y ajuste/comparación de múltiples algoritmos de regresión (AutoML simplificado).
Interfaz de Usuario: Desarrollo de una interfaz (e.g., Shiny) para la visualización de resultados e insights.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/Grupo CEIT:
CEIT – División TIC
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
El problema de cuadrar horarios de mantenimiento, conocido como Problema de Programación de Mantenimiento o Problema de Planificación de Mantenimiento (Maintenance Scheduling Problem), consiste en organizar actividades de mantenimiento dentro de un calendario de manera óptima. Este problema busca minimizar interrupciones y costos operativos, asegurando que tanto el mantenimiento preventivo como el correctivo se realicen en los momentos adecuados.
El objetivo de este proyecto de fin de grado es desarrollar una herramienta de optimización que aborde la programación eficiente de horarios de mantenimiento. La herramienta se desarrollará preferentemente en Python, con opciones adicionales de Matlab o R.
Actividades propuestas para el estudiante:
1. Revisión bibliográfica sobre los problemas y algoritmos de optimización más comunes aplicados en programación de mantenimiento.
2. Formulación matemática del problema, estableciendo los criterios y restricciones relevantes.
3. Implementación de la solución utilizando un algoritmo heurístico de optimización o solvers de código abierto.
4. Análisis de resultados y comparación de la efectividad del enfoque aplicado, con recomendaciones para su uso en distintas situaciones de mantenimiento.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/Grupo CEIT:
CEIT – División TIC
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
La aplicación de covariables dependientes del tiempo en análisis de supervivencia ha mejorado la predicción del tiempo de impago en modelos de scoring crediticio de comportamiento. Sin embargo, cuando estas covariables son endógenas, se producen dos problemas: sesgo en la estimación y la falta de un marco para predecir los valores futuros del evento y las covariables.
Los modelos conjuntos (joint models) son un enfoque estadístico que integra simultáneamente datos longitudinales y de supervivencia, permitiendo modelar la evolución conjunta de un evento de interés (como el tiempo de impago) y de las covariables endógenas dependientes del tiempo. Este proyecto explora por primera vez la aplicación de modelos conjuntos en tiempo discreto al scoring crediticio, y propone una extensión novedosa mediante la inclusión de términos autorregresivos en las covariables endógenas.
El proyecto aplicará estos métodos a datos de hipotecas en EE. UU., evaluando si los modelos conjuntos en tiempo discreto mejoran la precisión predictiva en comparación con los modelos de supervivencia tradicionales y si el rendimiento se optimiza al incluir un término autorregresivo.
Actividades propuestas para el estudiante:
1. Revisión bibliográfica sobre modelos conjuntos y su aplicación en scoring crediticio.
2. Formulación matemática del modelo conjunto en tiempo discreto.
3. Implementación del modelo en R o Python.
4. Análisis de resultados, comparando el rendimiento predictivo frente a otros modelos.
Este proyecto permitirá al estudiante explorar técnicas avanzadas de modelado estadístico aplicadas a datos financieros y mejorar las predicciones en el contexto del riesgo crediticio.
Supervisor académico:
Dr. Carlos Alejandro Peñuelas Angulo
Departamento Tecnun/Grupo CEIT:
CEIT – División TIC
Área temática:
Seguridad de la información, Análisis de datos
Descripción y objetivos:
El propósito general de este proyecto es el diseño e implementación de una arquitectura que ofrezca funciones análisis de datos (Machine Learning, data mining, etc.) como servicio implementando mecanismos para la preservación de la privacidad de los datos, también conocidos como Privacy Enhancing Technologies (PETs). Esto puede incluir desde el uso de mecanismos criptográficos avanzados hasta el aprendizaje federado.
Las actividades esperadas a realizar durante la ejecución de este proyecto son:
-
Analizar ejemplos de PETs aplicadas al análisis de datos.
-
Diseñar una arquitectura para el análisis de datos como servicio con preservación de privacidad.
-
Implementar la arquitectura utilizando tecnologías de vanguardia.
Supervisor académico:
Javier Cejudo
Departamento Tecnun/División CEIT:
CEIT – División TIC
Área temática:
Codificación y firmware, IoT, Diseño electrónico, sistemas embebidos, comunicaciones inalámbricas, automatización industrial, seguridad.
Descripción y objetivos:
Programación remota de FPGA desde un microcontrolador, sin la necesidad de utilizar un programador específico. El objetivo principal es implementar la lógica necesaria en un sistema embebido tipo microcontrolador para que éste actúe de programador de una FPGA. Se deberán implementar también las comunicaciones inalámbricas necesarias (Bluetooth, 4G…) para poder realizar esta programación en remoto y que sean accesibles desde cualquier parte del mundo.
Es un proyecto que propone un trabajo sobre elementos físicos y así poder testear y fomentar las habilidades practicas aplicadas.
Supervisor académico:
Iñigo Adin
Departamento Tecnun/División CEIT:
CEIT – División TIC
Área temática:
Superficies inteligentes, Comunicaciones inalámbricas, Simulación electromagnética, Estado del arte, Defensa, Seguridad, Ocultación selectiva, Diseño electrónico
Descripción y objetivos:
Embárcate en un Trabajo de Fin de Carrera pionero explorando el futuro de las comunicaciones y la defensa a través de los entornos inalámbricos programables. Este proyecto se sumerge en las tecnologías que están redefiniendo la interacción con las ondas electromagnéticas, como las Superficies Inteligentes Reconfigurables (RIS), los metamateriales y la emergente RIS Multifuncional (MF-RIS) que integra capacidades de detección para una operación autónoma. Tu misión será realizar una exhaustiva revisión del estado del arte, analizando las técnicas y tendencias fundamentales presentadas en las fuentes, desde la conformación de haces pasiva y la optimización de canales hasta los desafíos en canales de banda ancha y los fenómenos de campo cercano. A partir de esta investigación, deberás proponer aplicaciones innovadoras que aprovechen estas capacidades no solo para revolucionar las comunicaciones 6G, mejorando la cobertura, la seguridad y la eficiencia, sino también para desarrollar sistemas de defensa de vanguardia, incluyendo comunicaciones tácticas seguras, tecnologías de sigilo (stealth) para reducir la detectabilidad radar y acústica, y nuevas formas de guerra electrónica y vigilancia del entorno.
Supervisor académico:
Dr. Emilio Sánchez Tapia
Departamento Tecnun/División CEIT:
CEIT – Visión y Robótica
Área temática:
Automatización/robotización industrial
Descripción y objetivos:
Este proyecto final de grado nace como una continuación directa de un trabajo anterior en el que se automatizó con éxito la misma operación de desatornillado. En esa primera fase, la arquitectura de control se basó en un sistema industrial tradicional, utilizando un PLC para gobernar el robot KUKA. Habiendo validado la viabilidad mecánica y de visión del sistema, este nuevo proyecto se centra en explorar una arquitectura de control alternativa y más flexible.
El nuevo objetivo es, por tanto, abordar el control desde dos perspectivas diferentes para comparar sus prestaciones. En lugar de utilizar el PLC, un controlador especializado, extremadamente fiable y diseñado para operar en tiempo real, se implementará el mismo proceso utilizando ROS (Robot Operating System) en un ordenador convencional. ROS no es un sistema operativo como Windows, sino un conjunto de herramientas de software de código abierto que facilita enormemente la programación de robots y la integración de componentes como cámaras o algoritmos de inteligencia artificial. El alcance final es evaluar y cuantificar las ventajas y desventajas de cada enfoque: la robustez y determinismo del PLC industrial frente a la flexibilidad, rapidez de desarrollo y potencia de procesamiento que ofrece un sistema basado en ROS y un PC.
Tareas a realizar por el alumno:
-
Familiarización con el trabajo anterior
-
Aprendizaje de la técnica de programación del robot Kuka Issy
-
Aprendizaje del uso del sistema operativo ROS
-
Programación desde ROS de la ejecución de una secuencia de trayectorias para atornillar/desatornillar (lenguaje a definir, puede ser en Python o en C++)
-
Testeo y evaluación de las prestaciones conseguidas

Foto del robot colaborativo KUKA que se usará en el PFG.
- Supervisor académico:
Adam Podhorski
Área temática:
Diseño electrónico
Descripción y objetivos:
Este proyecto se enmarca en un proyecto de investigación más amplio cuyo propósito es poder medir el ruido ambiental desde uno o más drones. El objetivo principal del PFG que se propone consiste en diseñar e implementar la plataforma electrónica necesaria para el funcionamiento de una cámara acústica montada en un dron.
Una cámara acústica es un dispositivo que mide el nivel de ruido desde diferentes direcciones y lo representa en un mapa de calor superpuesto a una imagen real. Su aplicación es especialmente útil en estudios de contaminación acústica, localización de fuentes de ruido y diagnóstico en entornos industriales. Aquí se puede ver un ejemplo de este tipo de tecnología: Cámara acústica de GFaI.
¿En qué consiste el proyecto?
• Diseñar y construir una matriz de micrófonos con una cámara integrada.
• Capturar señales con micrófonos PDM (son micrófonos con salida digital).
• Integrar el sistema en un dron y realizar los vuelos de prueba en el polideportivo con fuentes de ruido reales.
El foco del PFG estará en el diseño, implementación y validación del sistema electrónico, no tanto en el procesamiento de señal.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
La aplicación de covariables dependientes del tiempo en análisis de supervivencia ha mejorado la predicción del tiempo de impago en modelos de scoring crediticio de comportamiento. Sin embargo, cuando estas covariables son endógenas, se producen dos problemas: sesgo en la estimación y la falta de un marco para predecir los valores futuros del evento y las covariables.
Los modelos conjuntos (joint models) son un enfoque estadístico que integra simultáneamente datos longitudinales y de supervivencia, permitiendo modelar la evolución conjunta de un evento de interés (como el tiempo de impago) y de las covariables endógenas dependientes del tiempo. Este proyecto explora por primera vez la aplicación de modelos conjuntos en tiempo discreto al scoring crediticio, y propone una extensión novedosa mediante la inclusión de términos autorregresivos en las covariables endógenas.
El proyecto aplicará estos métodos a datos de hipotecas en EE. UU., evaluando si los modelos conjuntos en tiempo discreto mejoran la precisión predictiva en comparación con los modelos de supervivencia tradicionales y si el rendimiento se optimiza al incluir un término autorregresivo.
Actividades propuestas para el estudiante:
-
Revisión bibliográfica sobre modelos conjuntos y su aplicación en scoring crediticio.
-
Formulación matemática del modelo conjunto en tiempo discreto.
-
Implementación del modelo en R o Python.
-
Análisis de resultados, comparando el rendimiento predictivo frente a otros modelos.
Este proyecto permitirá al estudiante explorar técnicas avanzadas de modelado estadístico aplicadas a datos financieros y mejorar las predicciones en el contexto del riesgo crediticio.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
El problema de cuadrar horarios de mantenimiento, conocido como Problema de Programación de Mantenimiento o Problema de Planificación de Mantenimiento (Maintenance Scheduling Problem), consiste en organizar actividades de mantenimiento dentro de un calendario de manera óptima. Este problema busca minimizar interrupciones y costos operativos, asegurando que tanto el mantenimiento preventivo como el correctivo se realicen en los momentos adecuados.
El objetivo de este proyecto de fin de grado es desarrollar una herramienta de optimización que aborde la programación eficiente de horarios de mantenimiento. La herramienta se desarrollará preferentemente en Python, con opciones adicionales de Matlab o R.
Actividades propuestas para el estudiante:
-
Revisión bibliográfica sobre los problemas y algoritmos de optimización más comunes aplicados en programación de mantenimiento.
-
Formulación matemática del problema, estableciendo los criterios y restricciones relevantes.
-
Implementación de la solución utilizando un algoritmo heurístico de optimización o solvers de código abierto.
-
Análisis de resultados y comparación de la efectividad del enfoque aplicado, con recomendaciones para su uso en distintas situaciones de mantenimiento.
Supervisor académico:
Markos Losada
Departamento Tecnun/División CEIT:
División de Transporte y Energía: Grupo de Transporte y Movilidad Sostenible
Área temática:
diseño electrónico, codificación, tratamiento de datos
Descripción y objetivos:
El planteamiento de este trabajo de fin de grado se centra en el análisis de las tecnologías avanzadas de estimación de distancia que podrían ser integradas en un sistema para una pulsera que permita analizar el juego de Pádel. El proyecto se divide en varias fases, comenzando con un análisis exhaustivo de los sistemas comerciales existentes, evaluando sus ventajas y proponiendo mejoras. La revisión de tecnologías actuales como los sensores de tiempo de vuelo (ToF), Lidar y ultrasonidos es fundamental para seleccionar la tecnología más adecuada para este propósito. La propuesta de mejora incluirá la selección de la tecnología, el desarrollo de un algoritmo específico y la integración del sistema, considerando factores como el tamaño, coste y consumo energético. El objetivo es que el alumno no solo adquiera conocimientos sobre estas tecnologías, sino que también proponga una solución concreta que pueda ser implementada.
En la fase de implementación, el alumno se encargará de integrar los sensores seleccionados y desarrollar un sistema capaz de detectar una matriz de puntos para estimar distancias con precisión. Los resultados obtenidos serán analizados para evaluar la efectividad del algoritmo propuesto y determinar la viabilidad de su implementación en un producto comercial. Este proyecto no solo busca mejorar la experiencia de juego en el pádel, sino también explorar aplicaciones potenciales de estas tecnologías en otros campos, como el pesaje o la monitorización de vagones
Supervisor académico:
Iñigo Adín
Departamento Tecnun/División CEIT:
División de Transporte y Energía: Grupo de Transporte y Movilidad Sostenible
Área temática:
Aprendizaje mediante inteligencia artificial, codificación, tratamiento de datos
Descripción y objetivos:
Este trabajo de fin de grado tiene como objetivo principal el desarrollo y la implementación de modelos de aprendizaje automático en microcontroladores de bajo consumo, específicamente de la familia STM32, utilizando TensorFlow Lite. El proyecto se centra en la aplicación de estos modelos en el sector del transporte, con un enfoque particular en el análisis y mejora de sistemas de frenado automático.
Para alcanzar este objetivo, el alumno deberá:
Formación en Herramientas y Tecnologías:
Adquirir conocimientos sobre TensorFlow Lite para microcontroladores, a través de recursos Machine Learning como la documentación de Andrew Ng, y "Aprendizaje Automático con Scikit-Learn, Keras y TensorFlow", como base y utilizando "Python para el Análisis de Datos" de Wes McKinney como referencia para el manejo y análisis de datos.
Desarrollo de Modelos de Aprendizaje Automático:
Diseñar y entrenar modelos de aprendizaje automático que puedan ser optimizados para su ejecución en microcontroladores de bajo consumo.
Evaluar el rendimiento de estos modelos en términos de precisión, eficiencia y consumo energético. Para ello, se tomarán datos con una bancada de frenos sensorizada y se entrenarán los modelos con ellos
Integración en Microcontroladores:
Implementar los modelos desarrollados en microcontroladores STM32 utilizando TensorFlow Lite. Asegurar que la integración sea eficiente en términos de recursos y resultados de fiabilidad de los resultados.
Aplicación en el Sector del Transporte:
Aplicar los modelos integrados para mejorar la función de frenado automático en vehículos, analizando datos en tiempo real para optimizar la seguridad y eficiencia del sistema.
Evaluar el impacto de la implementación en escenarios de prueba, ajustando los modelos según sea necesario para mejorar el rendimiento.
La documentación uy resultados se organizarán documentando las referencias y el proceso de desarrollo. Se presentarán los resultados obtenidos, destacando las mejoras logradas en la función de frenado automático y las posibles aplicaciones futuras de la tecnología desarrollada.
Supervisor académico:
Ainhoa Cortés/Juan Manuel Galán
Departamento Tecnun/División CEIT:
División de Materiales y Fabricación: Grupo de Sistemas Inteligentes para Industrial 4.0
Área temática:
Diseño electrónico, sistemas embebidos
Descripción y objetivos:
El objetivo de este PFG es la toma de contacto del alumno con la arquitectura RISC-V, sus características y su uso en sistemas embebidos. Para ello se propone la comparación de (al menos) un microcontrolador comercial basado en RISC-V contra RISC-V CEIT, un microcontrolador RISC-V desarrollado en CEIT. Este trabajo tratará de identificar las diferencias en diversos aspectos tales como (pero no limitados a):
- Funcionalidad (Extensiones ISA, Periféricos, Pinout…)
- Frecuencia de trabajo
- Consumo (teniendo en cuenta los modos de trabajo disponibles)
- Herramientas de desarrollo
Además, el alumno deberá proponer mejoras al diseño de microcontrolador desarrollado in-house para mejorar los déficits revelados de la anterior comparación.
Supervisor académico:
Andoni Irizar/Juan Manuel Galán
Departamento Tecnun/División CEIT:
División de Materiales y Fabricación: Grupo de Sistemas Inteligentes para Industrial 4.0
Área temática:
Diseño electrónico, sistemas embebidos
Descripción y objetivos:
Dentro de una de las líneas de investigación de CEIT, se ha desarrollado un microcontrolador basado en RISC-V actualmente disponible para FPGAs Xilinx y Microchip. El objetivo principal de este PFG es la adaptación de este microcontrolador a FPGA Altera mediante:
-
Análisis características de las FPGA Altera
-
Identificación de los elementos del microcontrolador a adaptar (parámetros, macros…)
-
Desarrollo de scripts de simulación y verificación funcional
-
Desarrollo de scripts de síntesis y constraints (timing y pinout)
-
Síntesis y verificación en placa
Supervisor académico:
Juan Manuel Galán/Andoni Irizar
Departamento Tecnun/División CEIT:
División de Materiales y Fabricación: Grupo de Sistemas Inteligentes para Industrial 4.0
Área temática:
Sistemas embebidos
Descripción y objetivos:
Dentro de una de las líneas de investigación de CEIT, se ha desarrollado un microcontrolador basado en RISC-V (RISC-V CEIT). El objetivo principal de este PFG es el desarrollo de un bootloader para este microcontrolador. Algunas de las actividades a realizar son:
-
Desarrollo y verificación librería SW (en C) para acceso a memoria Flash.
-
Desarrollo de bootloader capaz de cargar SW mediante UART y SPI (entre otras funciones)
-
Gap análisis desarrollo U-boot para RISC-V CEIT
Supervisor académico:
Emilio Sánchez Tapia
Departamento Tecnun/División CEIT:
División de Materiales y Fabricación: Grupo de Robótica y Control Industrial
Área temática:
Ingeniería Robótica
Descripción y objetivos:
En el contexto de la robótica del siglo XXI, surge el concepto de la fábrica conectada donde coexisten máquinas, robots móviles y humanos. Los robots móviles pueden o no constar de un brazo manipulador robótico o MoMa (MObile MAnipulator, MAnipulador MÓvil). En el caso de sólo existir el robot móvil se suele hablar de AMR (Autonomous Mobile Robot) o AGV (Autonomous Guide Vehicle) según su grado de libertad en la navegación (ver siguiente figura).

Figura 1: Elementos constitutivos de un robot colaborativo sobre plataforma (o MoMa).
La principal aplicación de este tipo de dispositivos es incrementar el nivel de automatización de la fábrica en sectores que a fecha de hoy la automatización tiene baja penetración, como puede ser la intralogística y machine tending. En estos escenarios el robot puede trasladar materias primas, productos en proceso de fabricación o incluso buscar piezas de reemplazo de máquinas (como por ejemplo un cabezal de corte para un CNC). En cualquier caso, el MoMa podrá hacer la tarea o bien de forma autónoma o bien como asistente de un operario humano (ver siguiente figura).

Figura 2: Escenario de fábrica donde un MoMa se convierte en un recurso más de la fábrica donde puede él trabajar sólo o en colaboración de otros operarios humanos.
Un escenario probable es que en la fábrica nos encontremos más de un robot móvil, cada uno de ellos con distintas capacidades y probablemente de distintos fabricantes. En este caso es importante contar con un software que coordine las tareas y las reparta adecuadamente según la disponibilidad y/o capacidad de cada robot. Dicho software es conocido con el nombre de gestor de flotas de robots.

Figura 3: Un gestor de flotas coordina el trabajo de un conjunto de robots.
Existen en el mercado numerosas soluciones para gestores de flota, pero suelen ser propietarias y compatibles con sólo una marca de robots.
El objetivo del proyecto final de grado es desplegar y testear un gestor de flotas robótico de código abierto (open-source). Los test se harán tanto en simulación como con robots reales.
A fecha de redacción del presente documento, se prevé utilizar open-rmf (Open-RMF: https://www.open-rmf.org/ ) o equivalente, ver siguiente figura.

Figura 4: Pantallazo de una simulación de flotas coordinadas desde open-rmf.
Se ofrece, durante la ejecución del proyecto:
-
Incorporación al grupo de robótica de investigadores del CEIT
-
Formación en las herramientas de software/hardware empleadas
-
Posibilidad de oferta de trabajo en una empresa del sector
Supervisor académico:
Enrique Castaño Carmona
División CEIT:
Advance Powder Metallurgy and Laser Manufacturing Group
Área temática:
Informática, modelización y simulación
Descripción y objetivos:
El mecanizado de materiales mediante el uso de láseres de pulso ultracorto es una tecnología de muy reciente desarrollo y que abre múltiples posibilidades en el ámbito de las superficies funcionales, tales como superficies de bajo coeficiente de fricción en aerogeneradores o superficies anti-hielo en aeronáutica.
Actualmente, Ceit lidera un proyecto europeo en el que uno de sus objetivos es desarrollar un software de simulación del proceso de mecanizado con este tipo de láseres. El modelado matemático del proceso se encuentra ya muy avanzado, así como su implementación numérica.
La tarea de este PFG será diseñar y desarrollar la interfaz gráfica con el usuario del programa de simulación de forma que su utilización resulte fácil e intuitiva. El estudiante aplicará y ampliará sus conocimientos de programación en Python, GUI (Graphic User Interface) y diseño UX/UI (User Experience/User Interface) para conseguir una interfaz que posibilite al usuario una experiencia atractiva del programa de simulación.
Supervisor académico:
Yuemin Ding
Departamento Tecnun:
Electrical and Electronic Engineering
Área temática:
Telecommunication
Descripción y objetivos:
Online monitoring and data collection in ultra-remote areas is specifically meaningful to investigate the local characteristics of climate change, biodiversity evolution, etc. It is also very important to prevent huge disasters, such as wildfires. However, online monitoring and data collection in ultra-remote areas have been challenging during the past decades. A major challenge is the lack of digital infrastructure for communication and data collection. However, the emerging satellite networking (such as Starlink) and low-power and long-distance IoT (such as MIoTy) technologies enable an alternate solution for online monitoring and data collection. The aim of this project is to develop a system based on satellite networks and low-power and long-distance IoT to enable online monitoring and data collection in ultra-remote areas.
Supervisor académico:
Ainara Rodríguez – Isabel Ayerdi
División CEIT:
Materiales y Fabricación. Grupo de Fabricación Avanzada en Pulvimetalurgia y Láser
Descripción y objetivos:
La funcionalización de superficies con láser es una aproximación ampliamente utilizada en una gran variedad de aplicaciones y sectores, ya que permite dotar a productos finales de acabados con funcionalidades añadidas, entre las que se encuentran, entre otras, los efectos decorativos, la capacidad de repeler líquidos o la mejora de la adhesión de recubrimientos. En estos momentos Ceit está desarrollando un proyecto de I+D internacional en este último campo, cuyo objetivo es mejorar la adhesión de recubrimientos antibacterianos y antivíricos a objetos de alto tráfico como manillas, interruptores o pulsadores.
En el marco de este proyecto en cooperación, se plantea un TFG cuyo objetivo es el diseño e implementación de un banco de ensayos para la caracterización de las propiedades superficiales de las muestras fabricadas, entre las que se encuentran la mejora de la adhesión, las características de hidrofobicidad/hidrofilicidad o las propiedades ópticas entre otras. Además de lo anterior, será necesario implementar un sistema de procesado inteligente de los datos obtenidos por los elementos de medida.
Supervisor académico:
Yago Olaizola
División CEIT:
Materiales y Fabricación. Grupo de Fabricación Avanzada en Pulvimetalurgia y Láser
Descripción y objetivos:
Los materiales transparentes se utilizan actualmente en multitud de aplicaciones en las que sus propiedades ópticas son especialmente relevantes: lentes, dispositivos para comunicaciones ópticas, vidrios inteligentes o sensores ópticos, entre otras. En este contexto, la caracterización de las propiedades ópticas es un punto clave en el desarrollo de los dispositivos.
El objetivo de este proyecto será diseñar e implementar un sistema de microscopía óptica, partiendo de diferentes elementos ópticos y mecánicos, para análisis de ciertas propiedades de los materiales transparentes. Tras la validación del equipo, se procederá a estudiar el comportamiento óptico de este tipo de sustratos tras diferentes procesos de grabado láser. En paralelo, será necesario implementar un sistema de procesado inteligente de los datos obtenidos por los dispositivos de medida.
Supervisor académico:
Gemma García Mandayo
División CEIT:
Materiales y Fabricación. Grupo de Fabricación Avanzada en Pulvimetalurgia y Láser
Descripción y objetivos:
El proyecto se enmarca dentro del desarrollo de un sistema innovador para la medida de la velocidad de sedimentación globular (VSG) y la coagulación, para su aplicación en el diagnóstico clínico. La finalidad principal del sistema es proporcionar resultados de la VSG y/o coagulación de la sangre en un tiempo mínimo, con una mínima cantidad de muestra y utilizando materiales sostenibles, ofreciendo prestaciones significativamente superiores a los dispositivos actualmente disponibles en el mercado, y permitiendo de esta forma un diagnóstico más rápido y precoz de patologías tales como infecciones, tumores o enfermedades autoinmunes.
El objetivo del proyecto es la optimización de los procesos de caracterización de muestras, desarrollando un banco de ensayos y efectuando pruebas que permitan mejorar las prestaciones del dispositivo.
Supervisor académico:
Íñigo Adín
División CEIT:
TIC
Área temática:
NDT, RF, Transporte
Descripción y objetivos:
Este proyecto pretende diseñar un sistema de detección de grietas en carriles ferroviarios. A nivel del principio básico de detección, se plantea aquí que se realice mediante una técnica de radar en tecnologías de radiofrecuencia con la capacidad de iluminar el carril en movimiento. Las reflexiones recibidas deberán de tratarse para determinar la presencia de grietas de tamaño menor al que se fija en las normativas antes de proceder al amolado del carril. Con este proyecto, se pretende avanzar en la concreción del principio básico de detección, e indagar en las necesidades de montaje sobre un elemento móvil.
Supervisor académico:
Íñigo Adín
División CEIT:
TIC
Área temática:
IoT, Energy Harvesting, bajo consumo
Descripción y objetivos:
Este proyecto plantea la adquisición y puesta en funcionamiento de plataformas novedosas para la transformación de movimiento, radiofrecuencia, sonido o viento en energía usable por sistemas autónomos IoT. Existen actualmente plataformas más integradas y más eficientes que prometen proporcionar alimentación a sistemas electrónicos de toma de datos y de conexión remota y conviene conocer el alcance real de sus posibilidades. Se refiere aquí a probar y fusionar las posibilidades de aprovechar elementos/eventos físicos pocos habituales para estas aplicaciones, para sustituir a las habituales placas solares.
Supervisor académico:
Leticia Zamora Cadenas – Iker Aguinaga Hoyos.
División CEIT:
Tecnologías de la Información y Comunicación. Grupo de Sistemas Inteligentes para Industria 4.0.
Área temática:
Ingeniería de Telecomunicación/Industrial
Descripción y objetivos:
Los sistemas de localización para interiores son un elemento en auge en los últimos años. Ya sea mediante tecnologías de radiofrecuencia, sensores inerciales o sistemas de visión artificial, la localización de objetos o personas en espacios interiores es un elemento clave en muchas aplicaciones (tracking de piezas, accesos a zonas de seguridad, seguimiento de personas, realidad aumentada, etc.).
Para determinar y evaluar la precisión de un sistema de localización, lo más habitual es recurrir a la medida manual de unos puntos de control o test en un entorno controlado, que permitan determinar la precisión del mismo. Sin embargo, este tipo de medidas siempre están sujetas a errores en la medida, errores humanos, y la imposibilidad de seguir un elemento que se mueve en tiempo real. Otra opción muy extendida, sobre todo cuando se quiere evaluar la precisión en dinámico, es recurrir a sistemas de gran coste económico que permitan crear el recorrido real o “ground truth”, como, por ejemplo, sistemas de seguimiento mediante visión. Sin embargo, no siempre es posible un despliegue de este tipo de sistemas, o no se dispone de los medios económicos para ello. Es por ello que, poder evaluar la precisión de los sistemas de posicionamiento en interiores con un coste bajo, sigue siendo un problema que investigadores y empresas intentan resolver.
Actualmente Ceit tiene una línea de investigación asociada a los sistemas de posicionamiento para espacios interiores, en la que trabaja con diversas empresas para dar solución a sus necesidades. Es por ello que nace la necesidad de tener un sistema de “ground truth” sencillo de instalar y de coste no elevado.
El cometido de este PFG sería desarrollar un sistema de “ground truth”, mediante el uso de sistemas de realidad virtual/aumentada, para su posterior uso en la evaluación de la precisión del sistema de localización en interiores del que es propietario Ceit. Se dispone del hardware HTC Vice, Oculus Quest y Hololens 2 para el desarrollo de este sistema empleando la plataforma de programación Unity3D. El candidat@ deberá tener conocimientos de programación en lenguaje C# o en lenguajes similares como C++ o Java.
Supervisor académico:
Emilio Sánchez Tapia
División CEIT:
Tecnologías de información y comunicaciones. Grupo de Sistemas Inteligentes para Industria 4.0. Subgrupo de Visión y Robótica
Área temática:
Ingeniería Robótica
Descripción y objetivos:
La industria 4.0 ha abierto camino a múltiples formas de automatización que tienen como objetivo mejorar la productividad y optimizar los procesos de trabajo. En este contexto, se pretende desarrollar un manipulador móvil inteligente: un nuevo tipo de robot que integra la tecnología de un robot móvil autónomo y un brazo robótico colaborativo muy eficiente capaz de realizar diversas operaciones.
La idea del proyecto es desarrollar un robot que pueda desplazarse, detectar y evitar obstáculos, explorar su entorno para reconocer objetos a través de la visión artificial y llevar a cabo tareas de manipulación de piezas, siendo capaz de interactuar con los operarios. Con la idea de implantar un modelo de transformación digital, exigido hoy en día en entornos de fábrica reales, los robots, elementos de control, sensores y el resto de elementos embarcados estarán conectados entre ellos a través de una plataforma digital para tener un control del proceso en tiempo real y desde cualquier lugar.
Actualmente CEIT tiene ya desarrollado un primer prototipo funcional (ver siguiente figura).

El cometido de este PFG sería la programación bajo ROS-2 de una secuencia de tareas para que el robot interactúe con una celda robotizada clásica. El caso concreto a desarrollar será que el robot vaya a un repositorio de piezas a procesar, las acerque a la celda, espere su procesamiento y las lleve a otro almacén de piezas ya clasificadas.
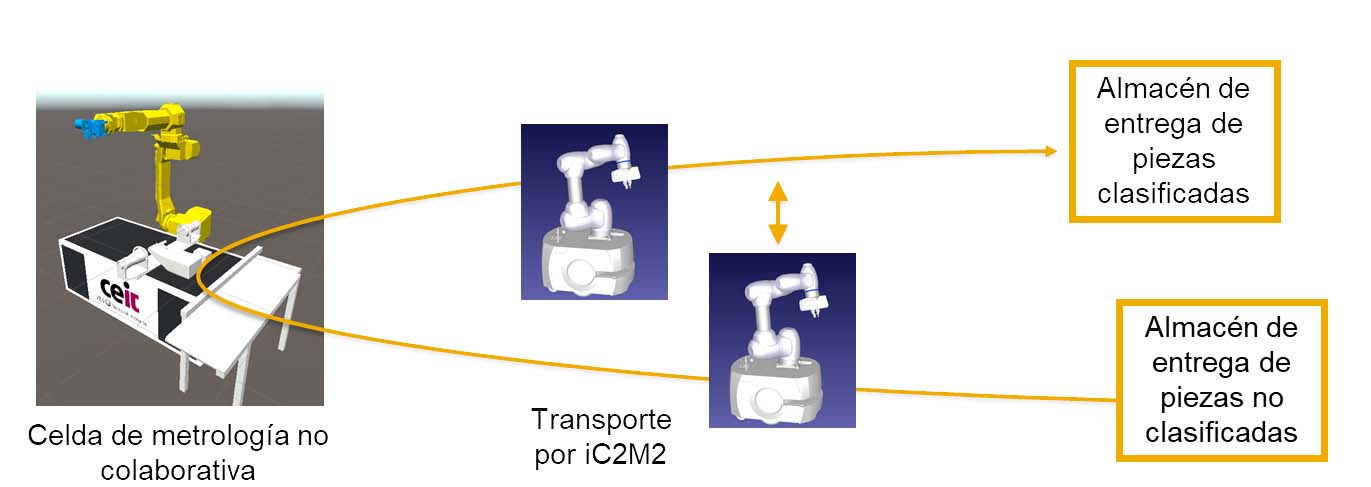
Bajo esta tarea simple, se probarán conceptos de:
- Robótica móvil colaborativa
- Machine tending
- Control en fuerza
- Problemática de sincronización de dos dispositivos automáticos
Se requiere conocimientos de programación en C/C++, Python o java-script.
Supervisor académico: Gurutz Artetxe.
División CEIT: Vehículo Eléctrico y Redes Inteligentes.
Área temática: Ingeniería Eléctrica.
Descripción y objetivos: El calentamiento por inducción es un método eficiente y rápido para generar calor. Puede ser empleado en diversas aplicaciones en las que se requiera templar, soldar o fundir metales. CEIT está interesado en desarrollar herramientas de cálculo (basadas en un conjunto de herramientas previamente desarrolladas) para utilizarlas en el diseño de sistemas de calentamiento por inducción para encofrados. El objetivo de este proyecto es modelar el comportamiento electromagnético y el calentamiento de un sistema de calentamiento de encofrados y que con ellos se realicen estudios de optimización para llevar a cabo el diseño de un caso práctico.

- Perfil/Grado: Tecnologías Industriales, Mecánica, Electricidad, Electrónica Industrial.
- Supervisor Académico: Juan Carlos Ramos.
- Departamento/Área: Departamento de Ingeniería Mecánica y Materiales / Área de Ingeniería Térmica y de Fluidos.
- Descripción: Se trata de resolver mediante el Método de las Diferencias Finitas un modelo térmico de la generación y la conducción de calor en el núcleo y las bobinas del interior de un transformador. Las ecuaciones del modelo y la resolución mediante el método iterativo de Gauss-Seidel se implementarán en Matlab. Se aplicarán cuestiones de transferencia de calor. Para ampliar la información contactar con el profesor.
Supervisor académico:
Andoni Irizar
Departamento Tecnun/División CEIT:
CEIT. División de Materiales y Fabricación
Área temática:
Sistemas electrónicos
Descripción y objetivos:
En los procesos industriales de hoy en día es cada vez más necesario monitorizar el proceso de fabricación y la calidad de los componentes que resultan del proceso. Existen una gran variedad de métodos que permiten esa monitorización en tiempo real, que no requieren separar las piezas del resto para su análisis y que no dañan las piezas en el proceso. Las técnicas de inspección más usadas son las que utilizan campos electromagnéticos, señales de ultrasonidos y visión artificial. Este proyecto trata sobre las técnicas de ultrasonidos. El Ceit dispone de un banco de ensayos de señales ultrasonidos propio que permite generar y capturar señales de ultrasonidos de una manera sencilla desde un PC. El objetivo del proyecto consistirá en realizar una propuesta de diseño de un banco de ensayos miniaturizado (por ejemplo, del tamaño de una Raspberry) Como comparación el diseño actual ocupa el tamaño de un ordenador Desktop. Se trataría de hacer un diagrama de bloques del sistema, realizar una selección de componentes que incluya la plataforma de procesamiento a utilizar y los componentes de la fuente de alimentación. Finalmente, será necesaria una estimación de consumo y coste del equipo final.
Supervisor académico:
Jorge Juan Gil.
Departamento Tecnun/División CEIT:
CEIT. Grupo de Sistemas Inteligentes para la Industria 4.0
Área temática:
Ingeniería de Sistemas y Control
Descripción y objetivos:
Hasta el momento los conceptos de control se muestran en la pizarra, por medio de simulaciones o con videos. Para la asignatura de Ingeniería de Control se desea construir un sistema de control mecánico (dos péndulos acoplados con muelles) que sirva para la docencia: mostrar en clase el distinto comportamiento del sistema antes varios controladores. Para garantizar la portabilidad, el sistema será controlable a través de USB por medio de una tarjeta ARDUINO. En un proyecto previo se ha construido el sistema mecánico. En el proyecto propuesto se programarán en C diversos controladores, en especial, un controlador proporcional-integral (PI) que permita “teleoperar” (que el usuario mueva uno de los péndulos y el otro siga su movimiento sin error en régimen permanente).