Ofertas en: Ingeniería Eléctrica
Supervisor académico:
Ibon Elósegui Simón
Departamento Tecnun/Grupo CEIT:
Tecnun: Departamento de Ingeniería Eléctrica y Electrónica
Descripción y Objetivos:
Este proyecto explora una solución innovadora: refrigeración directa por aceite mediante impacto de chorro (jet impingement) en conductores tipo hairpin, aplicada a máquinas eléctricas de alta densidad de potencia.
Mediante simulación CFD, analizamos cómo optimizar la transferencia térmica en motores eléctricos que impulsarán vehículos y aeronaves sostenibles, reduciendo pérdidas y aumentando fiabilidad.
Los resultados servirán como base para el diseño de sistemas de refrigeración más eficientes, contribuyendo a la electrificación del transporte aéreo y terrestre.
Supervisor académico:
José Martín Echeverría Ormaechea
Departamento Tecnun/Grupo CEIT:
CEIT: División de Transporte y Energía
Área temática:
Electrónica de Potencia, Actuadores Piezoeléctricos, Posicionamiento nanométrico
Descripción y Objetivos:
Los actuadores piezoeléctricos utilizados en sistemas de posicionamiento de alta precisión requieren etapas de potencia capaces de suministrar tensiones elevadas —habitualmente entre 100 V y 150 V— y corrientes transitorias asociadas a su naturaleza predominantemente capacitiva. Aunque existen controladores comerciales para este tipo de actuadores, muchos presentan configuraciones cerradas y limitadas que dificultan la optimización de su comportamiento o la incorporación de nuevas funcionalidades específicas.
El objetivo principal del proyecto es desarrollar y validar un sistema completo de electrónica de potencia que permita la excitación precisa y segura de actuadores piezoeléctricos destinados a aplicaciones de posicionamiento. El sistema deberá generar señales de control programables (unipolares o bipolares), operar sobre rangos de tensión adecuados para diferentes tipos de actuadores, y proporcionar una respuesta dinámica que permita evaluar el comportamiento tanto estático como transitorio del dispositivo.
La etapa de potencia incluirá:
-
Implementación de etapa de conversión de tensión a niveles adecuados para la excitación piezoeléctrica (p. ej., topologías boost, flyback o fuentes lineales de alta tensión).
-
Diseño de la etapa de amplificación capaz de suministrar corriente reactiva y mantener la linealidad requerida para aplicaciones de precisión.
-
Implementación de sistemas de control y modulación, necesarios para generar rampas, perfiles dinámicos o señales sinusoidales de prueba.
-
Sensado y monitorización interna de parámetros clave, como tensión aplicada, corriente instantánea o temperatura del sistema.
Este proyecto permitirá al estudiante profundizar en el diseño de convertidores de potencia de alta tensión, electrónica analógica de precisión, control de cargas capacitivas y técnicas de protección, obteniendo como resultado un módulo de accionamiento piezoeléctrico totalmente funcional y documentado.
Supervisor académico:
Luis Vitores Valcárcel García / Cristina Rodriguez
Departamento Tecnun/Grupo CEIT:
CEIT – División TIC / PTM
Área temática:
Optimización Matemática, Data Science, Materiales
Descripción y Objetivos:
Desarrollo de una aplicación de software robusta (preferentemente en Python) para la optimización de parámetros de ecuaciones constitutivas de materiales (modelos conocidos en la literatura).
El objetivo es automatizar la tarea de ajustar modelos a datos experimentales (leídos desde Excel/CSV) para predecir propiedades mecánicas. Se requiere comparar distintos algoritmos de optimización para determinar la mejor estrategia de ajuste. El proyecto debe integrarse o ser la base de una aplicación existente.
Actividades Propuestas:
-
Revisión bibliográfica de modelos constitutivos y algoritmos de optimización.
-
Formulación matemática del problema de optimización (función de error).
-
Implementación de la lectura de datos (Excel/CSV) y de las ecuaciones constitutivas.
-
Implementación y comparación de, al menos, dos algoritmos de optimización (e.g., Levenberg-Marquardt vs. Algoritmos Genéticos).
-
Desarrollo de la interfaz de usuario para la carga, ajuste y visualización de resultados.
-
Validación y análisis de la efectividad del software y los algoritmos aplicados.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/Grupo CEIT:
División TIC
Área temática:
Optimización Matemática, Data Science
Descripción y Objetivos:
Desarrollo de una aplicación en Python para automatizar el análisis exploratorio de datos (EDA) y el modelado predictivo de regresión.
El objetivo es construir una herramienta capaz de leer una base de datos (CSV/SQL), clasificar variables automáticamente (numéricas, categóricas), realizar estudios estadísticos univariantes y bivariantes (correlaciones, gráficos) y, finalmente, aplicar y comparar automáticamente modelos de regresión para una variable de interés. La meta es ofrecer un software robusto para el inicio rápido de proyectos de Data Science.
Actividades Propuestas:
-
Revisión de técnicas de AutoEDA y AutoRegresión.
-
Módulo de Ingesta: Lectura de datos y clasificación automática de variables.
-
Módulo EDA: Implementación de estudios estadísticos y gráficos automáticos (univariantes y de relación entre variables).
-
Módulo de Regresión: Preprocesamiento automático y ajuste/comparación de múltiples algoritmos de regresión (AutoML simplificado).
Interfaz de Usuario: Desarrollo de una interfaz (e.g., Shiny) para la visualización de resultados e insights.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/Grupo CEIT:
CEIT – División TIC
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
El problema de cuadrar horarios de mantenimiento, conocido como Problema de Programación de Mantenimiento o Problema de Planificación de Mantenimiento (Maintenance Scheduling Problem), consiste en organizar actividades de mantenimiento dentro de un calendario de manera óptima. Este problema busca minimizar interrupciones y costos operativos, asegurando que tanto el mantenimiento preventivo como el correctivo se realicen en los momentos adecuados.
El objetivo de este proyecto de fin de grado es desarrollar una herramienta de optimización que aborde la programación eficiente de horarios de mantenimiento. La herramienta se desarrollará preferentemente en Python, con opciones adicionales de Matlab o R.
Actividades propuestas para el estudiante:
1. Revisión bibliográfica sobre los problemas y algoritmos de optimización más comunes aplicados en programación de mantenimiento.
2. Formulación matemática del problema, estableciendo los criterios y restricciones relevantes.
3. Implementación de la solución utilizando un algoritmo heurístico de optimización o solvers de código abierto.
4. Análisis de resultados y comparación de la efectividad del enfoque aplicado, con recomendaciones para su uso en distintas situaciones de mantenimiento.
Supervisor académico:
Dr. Emilio Sánchez Tapia
Departamento Tecnun/División CEIT:
CEIT – Visión y Robótica
Área temática:
Automatización/robotización industrial
Descripción y objetivos:
Este proyecto final de grado nace como una continuación directa de un trabajo anterior en el que se automatizó con éxito la misma operación de desatornillado. En esa primera fase, la arquitectura de control se basó en un sistema industrial tradicional, utilizando un PLC para gobernar el robot KUKA. Habiendo validado la viabilidad mecánica y de visión del sistema, este nuevo proyecto se centra en explorar una arquitectura de control alternativa y más flexible.
El nuevo objetivo es, por tanto, abordar el control desde dos perspectivas diferentes para comparar sus prestaciones. En lugar de utilizar el PLC, un controlador especializado, extremadamente fiable y diseñado para operar en tiempo real, se implementará el mismo proceso utilizando ROS (Robot Operating System) en un ordenador convencional. ROS no es un sistema operativo como Windows, sino un conjunto de herramientas de software de código abierto que facilita enormemente la programación de robots y la integración de componentes como cámaras o algoritmos de inteligencia artificial. El alcance final es evaluar y cuantificar las ventajas y desventajas de cada enfoque: la robustez y determinismo del PLC industrial frente a la flexibilidad, rapidez de desarrollo y potencia de procesamiento que ofrece un sistema basado en ROS y un PC.
Tareas a realizar por el alumno:
-
Familiarización con el trabajo anterior
-
Aprendizaje de la técnica de programación del robot Kuka Issy
-
Aprendizaje del uso del sistema operativo ROS
-
Programación desde ROS de la ejecución de una secuencia de trayectorias para atornillar/desatornillar (lenguaje a definir, puede ser en Python o en C++)
-
Testeo y evaluación de las prestaciones conseguidas

Foto del robot colaborativo KUKA que se usará en el PFG.
Supervisor académico:
Luis Vitores Valcárcel García
Departamento Tecnun/División CEIT:
División TIC. Grupo de Análisis de Datos y Gestión de la Información
Área temática:
Optimización Matemática, Data Science
Descripción y objetivos:
El problema de cuadrar horarios de mantenimiento, conocido como Problema de Programación de Mantenimiento o Problema de Planificación de Mantenimiento (Maintenance Scheduling Problem), consiste en organizar actividades de mantenimiento dentro de un calendario de manera óptima. Este problema busca minimizar interrupciones y costos operativos, asegurando que tanto el mantenimiento preventivo como el correctivo se realicen en los momentos adecuados.
El objetivo de este proyecto de fin de grado es desarrollar una herramienta de optimización que aborde la programación eficiente de horarios de mantenimiento. La herramienta se desarrollará preferentemente en Python, con opciones adicionales de Matlab o R.
Actividades propuestas para el estudiante:
-
Revisión bibliográfica sobre los problemas y algoritmos de optimización más comunes aplicados en programación de mantenimiento.
-
Formulación matemática del problema, estableciendo los criterios y restricciones relevantes.
-
Implementación de la solución utilizando un algoritmo heurístico de optimización o solvers de código abierto.
-
Análisis de resultados y comparación de la efectividad del enfoque aplicado, con recomendaciones para su uso en distintas situaciones de mantenimiento.
Supervisor académico:
Emilio Sánchez Tapia
Departamento Tecnun/División CEIT:
División de Materiales y Fabricación: Grupo de Robótica y Control Industrial
Área temática:
Ingeniería Robótica
Descripción y objetivos:
En el contexto de la robótica del siglo XXI, surge el concepto de la fábrica conectada donde coexisten máquinas, robots móviles y humanos. Los robots móviles pueden o no constar de un brazo manipulador robótico o MoMa (MObile MAnipulator, MAnipulador MÓvil). En el caso de sólo existir el robot móvil se suele hablar de AMR (Autonomous Mobile Robot) o AGV (Autonomous Guide Vehicle) según su grado de libertad en la navegación (ver siguiente figura).

Figura 1: Elementos constitutivos de un robot colaborativo sobre plataforma (o MoMa).
La principal aplicación de este tipo de dispositivos es incrementar el nivel de automatización de la fábrica en sectores que a fecha de hoy la automatización tiene baja penetración, como puede ser la intralogística y machine tending. En estos escenarios el robot puede trasladar materias primas, productos en proceso de fabricación o incluso buscar piezas de reemplazo de máquinas (como por ejemplo un cabezal de corte para un CNC). En cualquier caso, el MoMa podrá hacer la tarea o bien de forma autónoma o bien como asistente de un operario humano (ver siguiente figura).

Figura 2: Escenario de fábrica donde un MoMa se convierte en un recurso más de la fábrica donde puede él trabajar sólo o en colaboración de otros operarios humanos.
Un escenario probable es que en la fábrica nos encontremos más de un robot móvil, cada uno de ellos con distintas capacidades y probablemente de distintos fabricantes. En este caso es importante contar con un software que coordine las tareas y las reparta adecuadamente según la disponibilidad y/o capacidad de cada robot. Dicho software es conocido con el nombre de gestor de flotas de robots.

Figura 3: Un gestor de flotas coordina el trabajo de un conjunto de robots.
Existen en el mercado numerosas soluciones para gestores de flota, pero suelen ser propietarias y compatibles con sólo una marca de robots.
El objetivo del proyecto final de grado es desplegar y testear un gestor de flotas robótico de código abierto (open-source). Los test se harán tanto en simulación como con robots reales.
A fecha de redacción del presente documento, se prevé utilizar open-rmf (Open-RMF: https://www.open-rmf.org/ ) o equivalente, ver siguiente figura.

Figura 4: Pantallazo de una simulación de flotas coordinadas desde open-rmf.
Se ofrece, durante la ejecución del proyecto:
-
Incorporación al grupo de robótica de investigadores del CEIT
-
Formación en las herramientas de software/hardware empleadas
-
Posibilidad de oferta de trabajo en una empresa del sector
Supervisor académico:
Ibon Elósegui
Tecnun. Departamento de Ingeniería Eléctrica y Electrónica
Área temática:
Accionamientos eléctricos, movilidad eléctrica.
Descripción y objetivos:
En los últimos años la electrificación está llegando al mundo del automóvil de una forma irreversible. A pesar de que la práctica mayoría de los fabricantes han adoptado la opción de motor radial con eje de transmisión, poco a poco se está analizando la posibilidad de introducir los motores en rueda para evitar sistemas mecánicos adicionales.
El objetivo del proyecto es analizar el estado del arte de los motores en rueda existentes. A partir de ahí se llevará a cabo un diseño completo del motor desde el punto de vista electromagnético y térmico, utilizando elementos finitos.

Supervisor académico:
Emilio Sánchez Tapia
División CEIT:
Tecnologías de información y comunicaciones. Grupo de Sistemas Inteligentes para Industria 4.0. Subgrupo de Visión y Robótica
Área temática:
Ingeniería Robótica
Descripción y objetivos:
La industria 4.0 ha abierto camino a múltiples formas de automatización que tienen como objetivo mejorar la productividad y optimizar los procesos de trabajo. En este contexto, se pretende desarrollar un manipulador móvil inteligente: un nuevo tipo de robot que integra la tecnología de un robot móvil autónomo y un brazo robótico colaborativo muy eficiente capaz de realizar diversas operaciones.
La idea del proyecto es desarrollar un robot que pueda desplazarse, detectar y evitar obstáculos, explorar su entorno para reconocer objetos a través de la visión artificial y llevar a cabo tareas de manipulación de piezas, siendo capaz de interactuar con los operarios. Con la idea de implantar un modelo de transformación digital, exigido hoy en día en entornos de fábrica reales, los robots, elementos de control, sensores y el resto de elementos embarcados estarán conectados entre ellos a través de una plataforma digital para tener un control del proceso en tiempo real y desde cualquier lugar.
Actualmente CEIT tiene ya desarrollado un primer prototipo funcional (ver siguiente figura).

El cometido de este PFG sería la programación bajo ROS-2 de una secuencia de tareas para que el robot interactúe con una celda robotizada clásica. El caso concreto a desarrollar será que el robot vaya a un repositorio de piezas a procesar, las acerque a la celda, espere su procesamiento y las lleve a otro almacén de piezas ya clasificadas.
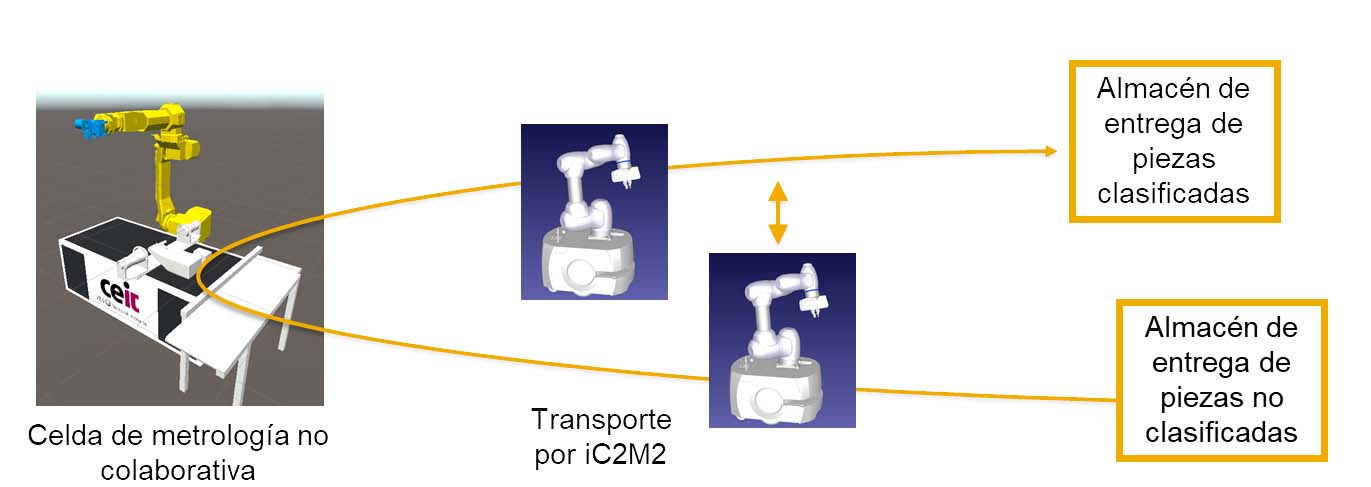
Bajo esta tarea simple, se probarán conceptos de:
- Robótica móvil colaborativa
- Machine tending
- Control en fuerza
- Problemática de sincronización de dos dispositivos automáticos
Se requiere conocimientos de programación en C/C++, Python o java-script.
Supervisor académico: Miguel Martínez-Iturralde.
División CEIT: Vehículo Eléctrico y Redes Inteligentes.
Área temática: Ingeniería Eléctrica.
Descripción y objetivos: En los últimos años ha habido un crecimiento exponencial de las aplicaciones aeronáuticas relacionadas con pequeños vehículos propulsados eléctricamente: drones, taxis voladores, vehículos de despegue vertical (VTOLs), etc. Para poder obtener vehículos voladores eléctricos con una autonomía práctica, se hace indispensable que el peso de los componentes que los forman sea mínimo. En el caso de los motores eléctricos, esto supone aumentar la densidad de potencia por encima de los valores de las soluciones actuales.
En este PFG se desea diseñar un motor de alta densidad de potencia para su aplicación en drones y pequeñas aeronaves eléctricas. El alumno manejará herramientas profesionales para el diseño y simulación de componentes eléctricos y trabajará en todos los ámbitos que conlleva desarrollar un sistema: electromagnético, térmico, mecánico, etc.

Supervisor académico: Miguel Martínez-Iturralde.
División CEIT: Vehículo Eléctrico y Redes Inteligentes.
Área temática: Ingeniería Eléctrica.
Descripción y objetivos: El desarrollo de aplicaciones aeronáuticas híbridas y totalmente eléctricas es una realidad, siendo numerosos los proyectos que han demostrado a pequeña escala la viabilidad de una aeronáutica más silenciosa y respetuosa con el medioambiente. En este sentido, los grandes actores del sector eléctrico (Airbus, Boeing, Rolls-Royce, etc.) están dedicando grandes esfuerzos a la electrificación de aviones comerciales.
Uno de los retos para el desarrollo de aviones propulsados eléctricamente está relacionado con el diseño de sistemas de aislamiento eléctrico a alta tensión que puedan operar a grandes alturas, donde la presión del aire es mínima y el riesgo de que se produzcan descargas eléctricas mayor. Actualmente, Ceit se encuentra inmerso en un proyecto europeo en el que se busca desarrollar sistemas de aislamiento que sean aplicables en las aeronaves eléctricas del mañana.
El cometido de este PFG sería simular sistemas eléctricos de aeronaves mediante software comercial de elementos finitos y obtener criterios de diseño para su posterior aplicación en aviones eléctricos.

Supervisor académico: Marco Satrústegui.
División CEIT: Vehículo Eléctrico y Redes Inteligentes.
Área temática: Ingeniería Eléctrica.
Descripción y objetivos: El ruido generado por los motores eléctricos cobra cada vez más importancia debido a que va embebido en sistemas donde el confort es un aspecto muy importante (por ejemplo: coches eléctricos). En este sentido, este PFG trata de caracterizar el ruido en un motor eléctrico realizando un análisis multifísico, empezando por caracterizar la máquina a nivel electromagnético y térmico para después desarrollar un análisis mecánico que resulte en la obtención del ruido generado a distintos niveles de par y velocidad de giro.

Supervisor académico: Jesús Paredes.
División CEIT: Vehículo Eléctrico y Redes Inteligentes.
Área temática: Ingeniería Eléctrica.
Descripción y objetivos: Durante la última década, muchos de los sistemas auxiliares de los aviones (neumáticos, hidráulicos y mecánicos) se han ido sustituyendo por actuadores eléctricos o híbridos, debido a los incentivos para la reducción de emisión de gases de efecto invernadero y la reducción de costes de operación y mantenimiento. Ello, ha implicado un aumento considerable en la potencia eléctrica instalada en las aeronaves.
Tradicionalmente, el arranque de las turbinas se hacía mediante un sistema neumático y la energía necesaria para alimentar los sistemas eléctricos de la aeronave se producía mediante generadores acoplados a las turbinas. Actualmente, ambos sistemas han convergido en una única máquina eléctrica capaz de trabajar como motor y como generador. Entre estos sistemas se encuentran los arrancadores/generadores de las turbinas de los aviones. El aumento de la demanda de energía eléctrica y el limitado espacio para los arrancadores/generadores hace necesario aumentar la densidad de potencia de estas máquinas.
El tamaño y, por tanto, el peso y el coste, de una máquina eléctrica viene fundamentalmente determinado por la extracción de calor y el límite de temperatura de los materiales que se emplean en la fabricación de la misma. Los sistemas de refrigeración por aceite presentan características prometedoras. De entre todos los sistemas de refrigeración por aceite (spray, oil-dripping…), se pretenden abordar en este proyecto los sistemas de estator inundado por aceite.
El objetivo de este proyecto es que el alumno se familiarice son herramientas de simulación de fluidos y sistemas de refrigeración y que extraiga conclusiones de cara a optimizar los sistemas de refrigeración por aceite de motores de aviación.

Supervisor académico: Gurutz Artetxe.
División CEIT: Vehículo Eléctrico y Redes Inteligentes.
Área temática: Ingeniería Eléctrica.
Descripción y objetivos: El calentamiento por inducción es un método eficiente y rápido para generar calor. Puede ser empleado en diversas aplicaciones en las que se requiera templar, soldar o fundir metales. CEIT está interesado en desarrollar herramientas de cálculo (basadas en un conjunto de herramientas previamente desarrolladas) para utilizarlas en el diseño de sistemas de calentamiento por inducción para encofrados. El objetivo de este proyecto es modelar el comportamiento electromagnético y el calentamiento de un sistema de calentamiento de encofrados y que con ellos se realicen estudios de optimización para llevar a cabo el diseño de un caso práctico.

- Perfil/Grado: Tecnologías Industriales, Mecánica, Electricidad, Electrónica Industrial.
- Supervisor Académico: Juan Carlos Ramos.
- Departamento/Área: Departamento de Ingeniería Mecánica y Materiales / Área de Ingeniería Térmica y de Fluidos.
- Descripción: Se trata de resolver mediante el Método de las Diferencias Finitas un modelo térmico de la generación y la conducción de calor en el núcleo y las bobinas del interior de un transformador. Las ecuaciones del modelo y la resolución mediante el método iterativo de Gauss-Seidel se implementarán en Matlab. Se aplicarán cuestiones de transferencia de calor. Para ampliar la información contactar con el profesor.